Page History
Overview
| Scroll Ignore | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||
This tutorial guides you from inital Starterkit reference design for TE0807 SoM to custom extensible vitis platfom and then shows how to implement and run basic VADD example and Vitis-AI 2.0 dpu_trd example (ResNet50).
| Page properties | ||||
|---|---|---|---|---|
| ||||
Notes :
|
Key Features
| Page properties | ||||
|---|---|---|---|---|
| ||||
Notes :
|
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
| Excerpt |
|---|
|
Requirements
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
| Scroll Title | ||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||
|
| Page properties | ||||
|---|---|---|---|---|
| ||||
General Chapter Vitis AI Prepare Development Environment 2021.2 is included |
| Excerpt Include | ||||||
|---|---|---|---|---|---|---|
|
| Page properties | ||||
|---|---|---|---|---|
| ||||
| end of chapter "Prepare Development Environment2 |
Prepare Reference Design for Extensible Custom Platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Update Vivado Project for Extensible Platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
| Note |
|---|
Trenz Electronic Scripts allows posibility change some setup via enviroment variables, which depends on the used OS and PC performace. To improve performance on multicore CPU add global envirment on line 64: to /etc/bash.bashrc or local to design_basic_settings.sh For othervariables see also: |
In Ubuntu terminal, source paths to Vitis and Vivado tools by
| Code Block | ||
|---|---|---|
| ||
$ source /tools/Xilinx/Vitis/2021.2/settings64.sh |
Download TE0807 StarterKit Linux Design file(see Reference Design download link on chapter Requirements) with pre-build files to
~/Downloads/TE0807-StarterKit-vivado_2021.2-build_18_20221017093227.zip
This TE0807 StarterKit TE0807 StarterKit ZIP file contains bring-up scripts for creation of Petalinux for range of modules in zipped directory named “StarterKit”.
Unzip the file to directory:
~/work/te0807_52_240
| Note |
|---|
| All supported modules are identified in file: ~/work/te0807_52_240/StarterKit/board_files/TE0807_board_files.csv |
We will select module 52 with name TE0807-03-7DE21-A , with device xczu7ev-fbvb900-1-e on tebf0808 TEBF0808 carrier board. We will use default clock 240 MHz.
That is why we name the package te0807_52_240 and proposed to unzip the TE0807 StarterKit Linux Design files into the directory:
~/work/te0807_52_240
In Ubuntu terminal, change directory to the StarterKit directory:
| Code Block | ||
|---|---|---|
| ||
$ cd ~/work/te0807_52_240/StarterKit |
Setup the StarterKit directory files for a Linux host machine.
In Ubuntu terminal, execute:
| Code Block | ||
|---|---|---|
| ||
$ chmod ugo+rwx ./console/base_sh/*.sh $ chmod ugo+rwx ./_create_linux_setup.sh $ ./_create_linux_setup.sh |
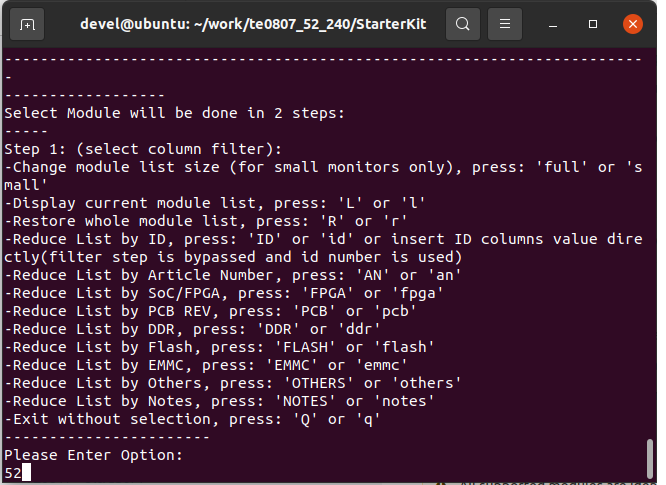
Select option (0) to open Selection Guide and press Enter
| Scroll Title | ||
|---|---|---|
| ||
|

Select variant 52 from the selection guide, press enter and agree selection
| Scroll Title | ||
|---|---|---|
| ||
|
Create Vivado Project with option 1
| Scroll Title | ||
|---|---|---|
| ||
|
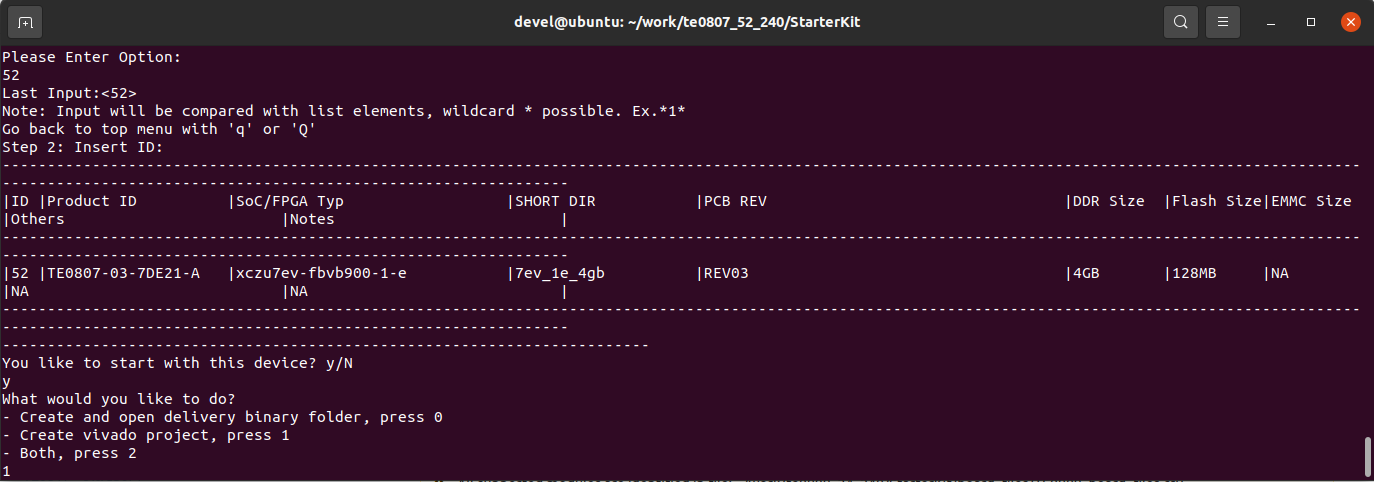
Vivado Project will be generated for the selected variant.
| Note | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Selection Guide automatically modified ./design_basic_settings.sh with correct variant, so other provided bash files to recreate or open Vivado project again can be used later also. In case of using selection guide, variant can be selected also manually:
|
The Vivado will be opened and Trenz Electronic HW project for the TE0807 StarterKit Linux Design, part 52 will be generated.
| Scroll Title | ||
|---|---|---|
| ||
|
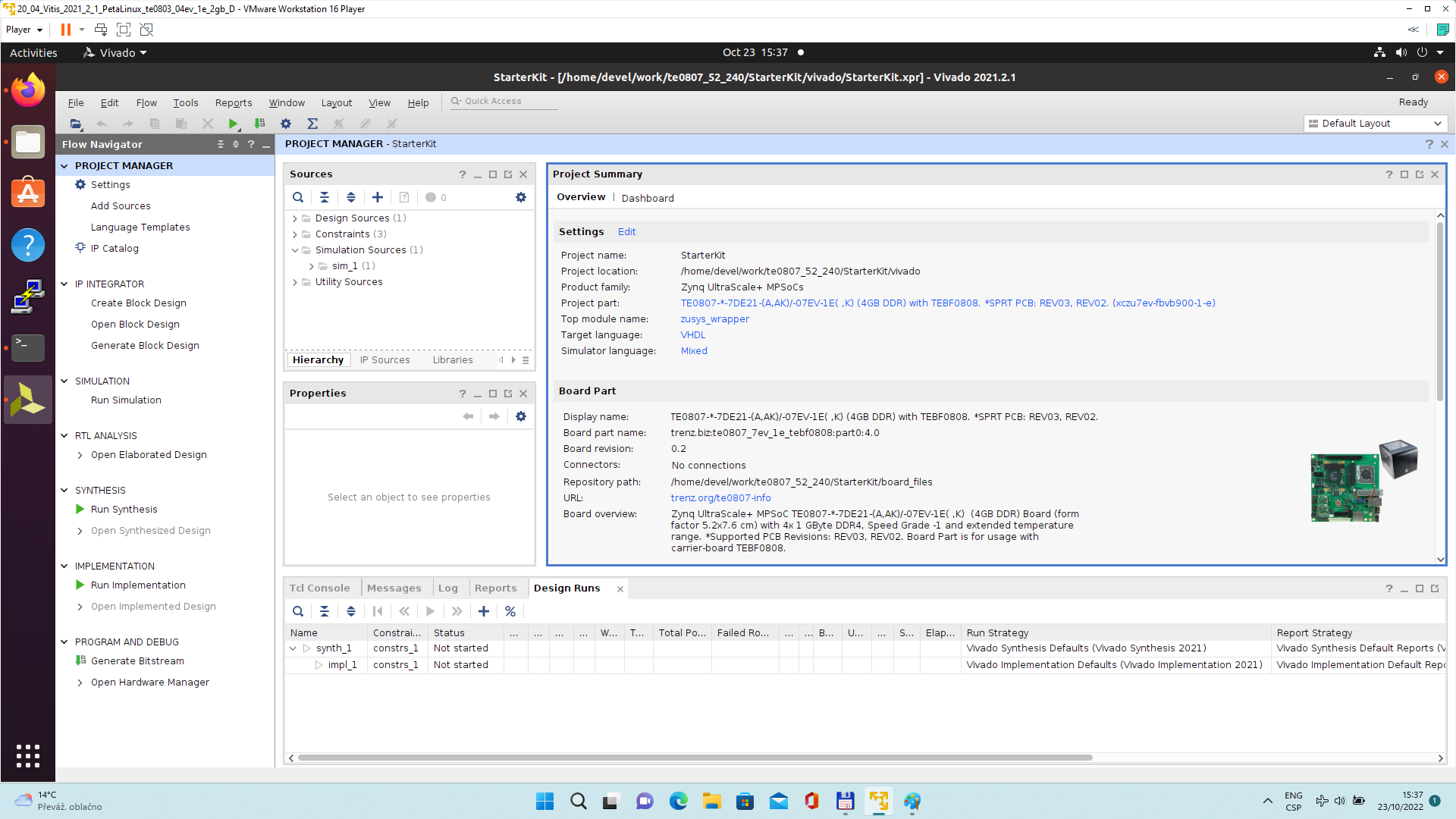
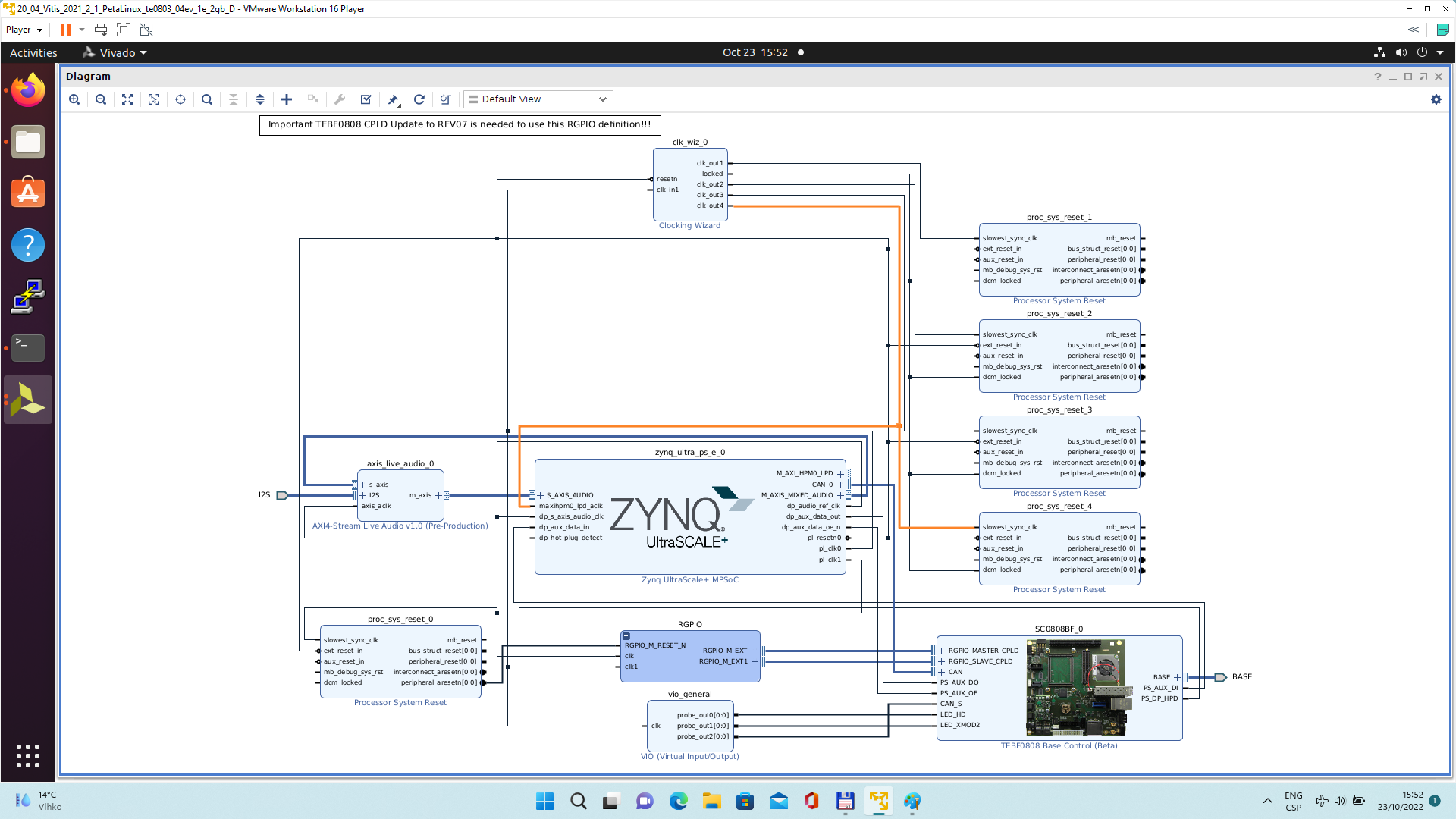
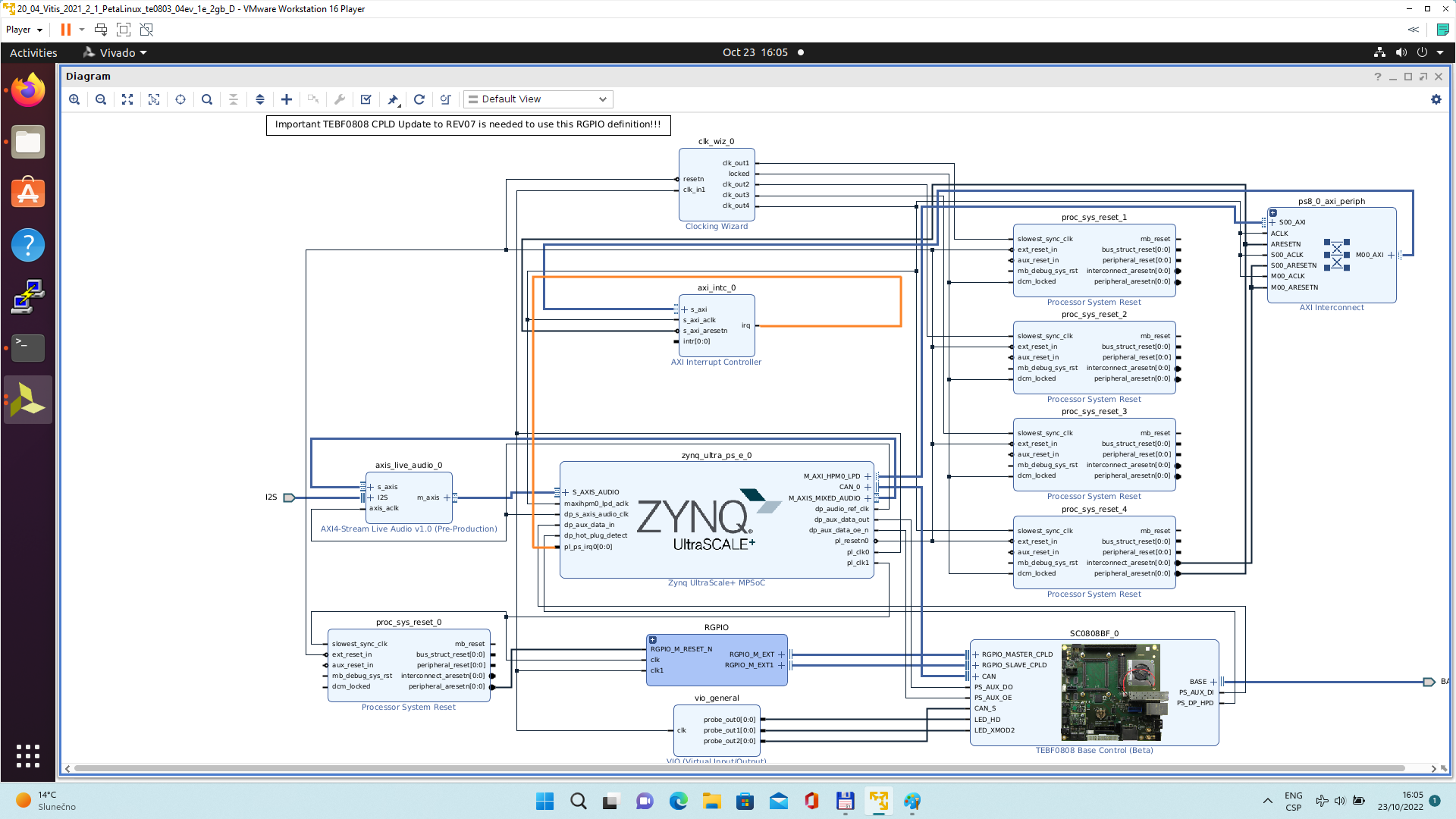
In Vivado window Sources, click on zusys_wrapper and next on zusys.bd to open the HW diagram in IP integrator:
| Scroll Title | ||
|---|---|---|
| ||
|
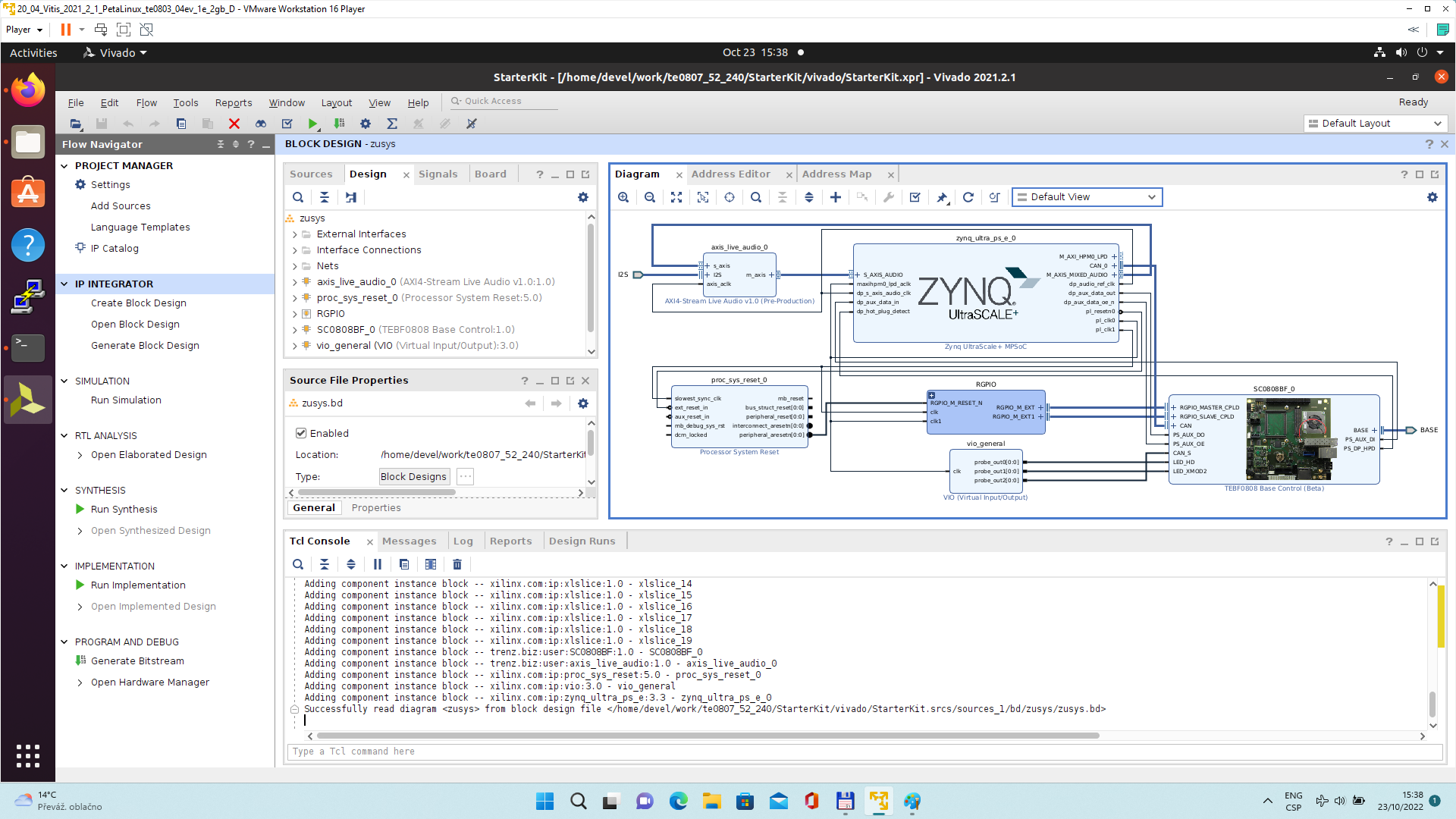
It is possible to display diagram in separate window by clicking on float icon in upper right corner of the diagram.
| Scroll Title | ||
|---|---|---|
| ||
|
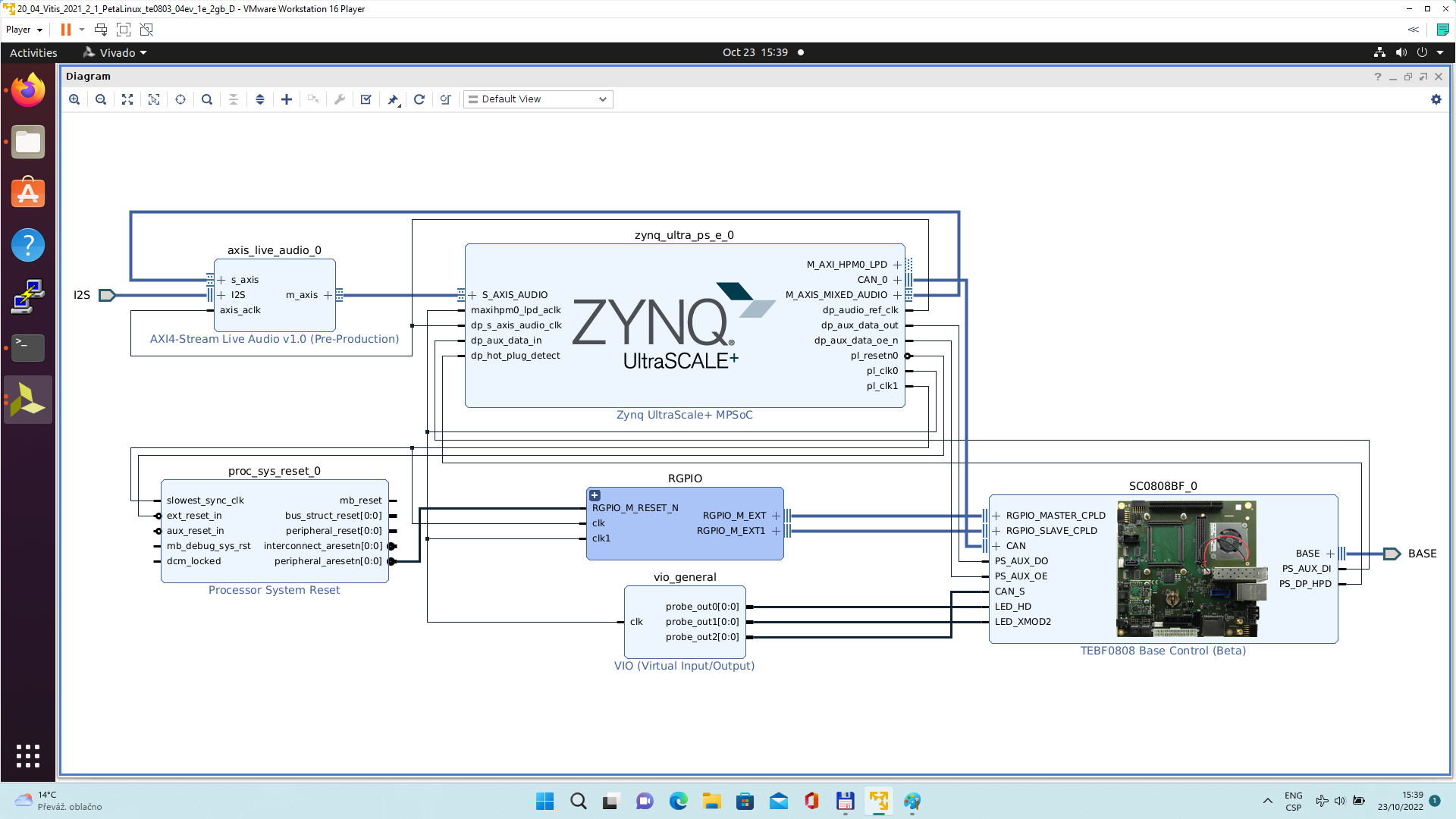
Zynq Ultrascale+ block is configured for the Trenz TE0807 StarterKit Linux Design on the tebf0808 TEBF0808 carrier board.
This is starting point for the standard PetaLinux system supported by Trenz with steps for generation of the PetaLinux system. Parameters of this system and compilation steps are described on Trenz Wiki pages:
https://wiki.trenz-electronic.de/display/PD/TE0807+StarterKit
Follow steps described in these wiki pages if you would like to create fixed, not extensible Vitis platform.
The Extensible Vitis platform generation steps are described in next paragraphs.
Create Extensible Vitis platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
To implement hardware this tutorial offers two alternatives: Fast Track or Manual Track:
- Choose Fast Track to use TCL script to do the same modifications as in manual track case automatically,
- Select Manual Track path if you want to see all required hardware modifications required for custom platform.
Fast Track
Block Design of the Vivado project must be opened for this step. Copy following TCL Code to the TCL comand console of Vivado:
| Code Block | ||||||
|---|---|---|---|---|---|---|
| ||||||
#activate extensible platform set_property platform.extensible true [current_project] save_bd_design #set_property PFM_NAME "xilinx:te0808_15eg_1e_tebf0808TEBF0808:zusys:0.0" [get_files zusys.bd] set_property PFM_NAME [string map {part0 zusys} [string map {trenz.biz trenz} [current_board_part]]] [get_files zusys.bd] set_property platform.design_intent.embedded {true} [current_project] set_property platform.design_intent.datacenter {false} [current_project] set_property platform.design_intent.server_managed {false} [current_project] set_property platform.design_intent.external_host {false} [current_project] set_property platform.default_output_type {sd_card} [current_project] set_property platform.uses_pr {false} [current_project] save_bd_design #set_property pfm_name {xilinx:te0808_15eg_1e_tebf0808TEBF0808:zusys:0.0} [get_files -all {zusys.bd}] #set_property platform.name {zusys} [current_project] #add clocking wizard startgroup create_bd_cell -type ip -vlnv xilinx.com:ip:clk_wiz:6.0 clk_wiz_0 endgroup #clocking wizard config set_property -dict [list CONFIG.CLKOUT2_USED {true} CONFIG.CLKOUT3_USED {true} CONFIG.CLKOUT4_USED {true} CONFIG.CLKOUT2_REQUESTED_OUT_FREQ {200.000} CONFIG.CLKOUT3_REQUESTED_OUT_FREQ {400.000} CONFIG.CLKOUT4_REQUESTED_OUT_FREQ {240.000} CONFIG.RESET_TYPE {ACTIVE_LOW} CONFIG.MMCM_CLKOUT1_DIVIDE {6} CONFIG.MMCM_CLKOUT2_DIVIDE {3} CONFIG.MMCM_CLKOUT3_DIVIDE {5} CONFIG.NUM_OUT_CLKS {4} CONFIG.RESET_PORT {resetn} CONFIG.CLKOUT2_JITTER {102.086} CONFIG.CLKOUT2_PHASE_ERROR {87.180} CONFIG.CLKOUT3_JITTER {90.074} CONFIG.CLKOUT3_PHASE_ERROR {87.180} CONFIG.CLKOUT4_JITTER {98.767} CONFIG.CLKOUT4_PHASE_ERROR {87.180}] [get_bd_cells clk_wiz_0] #connect clocking wizard inputs connect_bd_net [get_bd_pins clk_wiz_0/resetn] [get_bd_pins zynq_ultra_ps_e_0/pl_resetn0] connect_bd_net [get_bd_pins clk_wiz_0/clk_in1] [get_bd_pins zynq_ultra_ps_e_0/pl_clk0] #add reset cores startgroup create_bd_cell -type ip -vlnv xilinx.com:ip:proc_sys_reset:5.0 proc_sys_reset_1 create_bd_cell -type ip -vlnv xilinx.com:ip:proc_sys_reset:5.0 proc_sys_reset_2 create_bd_cell -type ip -vlnv xilinx.com:ip:proc_sys_reset:5.0 proc_sys_reset_3 create_bd_cell -type ip -vlnv xilinx.com:ip:proc_sys_reset:5.0 proc_sys_reset_4 endgroup #connect reset cores connect_bd_net [get_bd_pins clk_wiz_0/clk_out1] [get_bd_pins proc_sys_reset_1/slowest_sync_clk] connect_bd_net [get_bd_pins clk_wiz_0/clk_out2] [get_bd_pins proc_sys_reset_2/slowest_sync_clk] connect_bd_net [get_bd_pins clk_wiz_0/clk_out3] [get_bd_pins proc_sys_reset_3/slowest_sync_clk] connect_bd_net [get_bd_pins clk_wiz_0/clk_out4] [get_bd_pins proc_sys_reset_4/slowest_sync_clk] connect_bd_net [get_bd_pins clk_wiz_0/locked] [get_bd_pins proc_sys_reset_1/dcm_locked] connect_bd_net [get_bd_pins clk_wiz_0/locked] [get_bd_pins proc_sys_reset_2/dcm_locked] connect_bd_net [get_bd_pins proc_sys_reset_3/dcm_locked] [get_bd_pins clk_wiz_0/locked] connect_bd_net [get_bd_pins proc_sys_reset_4/dcm_locked] [get_bd_pins clk_wiz_0/locked] connect_bd_net [get_bd_pins proc_sys_reset_1/ext_reset_in] [get_bd_pins zynq_ultra_ps_e_0/pl_resetn0] connect_bd_net [get_bd_pins proc_sys_reset_2/ext_reset_in] [get_bd_pins zynq_ultra_ps_e_0/pl_resetn0] connect_bd_net [get_bd_pins proc_sys_reset_3/ext_reset_in] [get_bd_pins zynq_ultra_ps_e_0/pl_resetn0] connect_bd_net [get_bd_pins proc_sys_reset_4/ext_reset_in] [get_bd_pins zynq_ultra_ps_e_0/pl_resetn0] # add clocks to platform set_property PFM.CLOCK {clk_out1 {id "1" is_default "false" proc_sys_reset "/proc_sys_reset_1" status "fixed" freq_hz "100000000"} clk_out2 {id "2" is_default "false" proc_sys_reset "/proc_sys_reset_2" status "fixed" freq_hz "200000000"} clk_out3 {id "3" is_default "false" proc_sys_reset "/proc_sys_reset_3" status "fixed" freq_hz "400000000"} clk_out4 {id "4" is_default "true" proc_sys_reset "/proc_sys_reset_4" status "fixed" freq_hz "240000000"}} [get_bd_cells /clk_wiz_0] # prepare LPD interface for 240MHz for interrupt controller disconnect_bd_net /zynq_ultra_ps_e_0_pl_clk1 [get_bd_pins zynq_ultra_ps_e_0/maxihpm0_lpd_aclk] connect_bd_net [get_bd_pins clk_wiz_0/clk_out4] [get_bd_pins zynq_ultra_ps_e_0/maxihpm0_lpd_aclk] #add interrupt core startgroup create_bd_cell -type ip -vlnv xilinx.com:ip:axi_intc:4.1 axi_intc_0 endgroup #config interrupt core set_property -dict [list CONFIG.C_KIND_OF_INTR.VALUE_SRC USER] [get_bd_cells axi_intc_0] set_property -dict [list CONFIG.C_KIND_OF_INTR {0x00000000} CONFIG.C_IRQ_CONNECTION {1}] [get_bd_cells axi_intc_0] #connect interrupt core connect_bd_net [get_bd_pins axi_intc_0/s_axi_aclk] [get_bd_pins clk_wiz_0/clk_out4] connect_bd_net [get_bd_pins axi_intc_0/s_axi_aresetn] [get_bd_pins proc_sys_reset_4/peripheral_aresetn] startgroup create_bd_cell -type ip -vlnv xilinx.com:ip:axi_interconnect:2.1 axi_interconnect_0 endgroup set_property -dict [list CONFIG.NUM_MI {1}] [get_bd_cells axi_interconnect_0] connect_bd_net [get_bd_pins axi_interconnect_0/ACLK] [get_bd_pins clk_wiz_0/clk_out4] connect_bd_net [get_bd_pins axi_interconnect_0/ARESETN] [get_bd_pins proc_sys_reset_4/peripheral_aresetn] connect_bd_net [get_bd_pins axi_interconnect_0/S00_ARESETN] [get_bd_pins proc_sys_reset_4/interconnect_aresetn] connect_bd_net [get_bd_pins axi_interconnect_0/M00_ARESETN] [get_bd_pins proc_sys_reset_4/interconnect_aresetn] connect_bd_net [get_bd_pins axi_interconnect_0/S00_ACLK] [get_bd_pins clk_wiz_0/clk_out4] connect_bd_net [get_bd_pins axi_interconnect_0/M00_ACLK] [get_bd_pins clk_wiz_0/clk_out4] connect_bd_intf_net [get_bd_intf_pins zynq_ultra_ps_e_0/M_AXI_HPM0_LPD] -boundary_type upper [get_bd_intf_pins axi_interconnect_0/S00_AXI] connect_bd_intf_net -boundary_type upper [get_bd_intf_pins axi_interconnect_0/M00_AXI] [get_bd_intf_pins axi_intc_0/s_axi] #rename interconnect set_property name ps8_0_axi_periph [get_bd_cells axi_interconnect_0] #add zynqUS interrupt inputs and connect intr IP core startgroup set_property -dict [list CONFIG.PSU__USE__IRQ0 {1}] [get_bd_cells zynq_ultra_ps_e_0] endgroup connect_bd_net [get_bd_pins axi_intc_0/irq] [get_bd_pins zynq_ultra_ps_e_0/pl_ps_irq0] # add interrputs to platform set_property PFM.IRQ {intr { id 0 range 32 }} [get_bd_cells /axi_intc_0] # add axi buses to platform set_property PFM.AXI_PORT {M_AXI_HPM0_FPD {memport "M_AXI_GP" sptag "GP0" memory "" is_range "false"} M_AXI_HPM1_FPD {memport "M_AXI_GP" sptag "GP1" memory "" is_range "false"} S_AXI_HPC0_FPD {memport "S_AXI_HP" sptag "HPC0" memory "" is_range "false"} S_AXI_HPC1_FPD {memport "S_AXI_HP" sptag "HPC1" memory "" is_range "false"} S_AXI_HP0_FPD {memport "S_AXI_HP" sptag "HP0" memory "" is_range "false"} S_AXI_HP1_FPD {memport "S_AXI_HP" sptag "HP1" memory "" is_range "false"} S_AXI_HP2_FPD {memport "S_AXI_HP" sptag "HP2" memory "" is_range "false"} S_AXI_HP3_FPD {memport "S_AXI_HP" sptag "HP3" memory "" is_range "false"}} [get_bd_cells /zynq_ultra_ps_e_0] #add interconnect ports to platform set_property PFM.AXI_PORT {M01_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M02_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M03_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M04_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M05_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M06_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"} M07_AXI {memport "M_AXI_GP" sptag "" memory "" is_range "false"}} [get_bd_cells /ps8_0_axi_periph] # add addresses to unmapped peripherals assign_bd_address #save save_bd_design #save project XPR name global proj_xpr set proj_xpr [current_project] append proj_xpr .xpr #close project close_project # reopen project open_project $proj_xpr # open block design open_bd_design [current_project].srcs/sources_1/bd/zusys/zusys.bd #validate #validate_bd_design |
This script modifies the Initial platform Block design into the Extensible platform Block design and also defines define Platform Setup configuration.
In Vivado, open the design explorer and Platform description.
The fast track result is identical to the manually performed modifications described in next sections. In Vivado, save block design by clicking on icon “Save Block Design”.
| Scroll Title | ||
|---|---|---|
| ||
 |
Continue the design path with Validate Design.
Manual Track
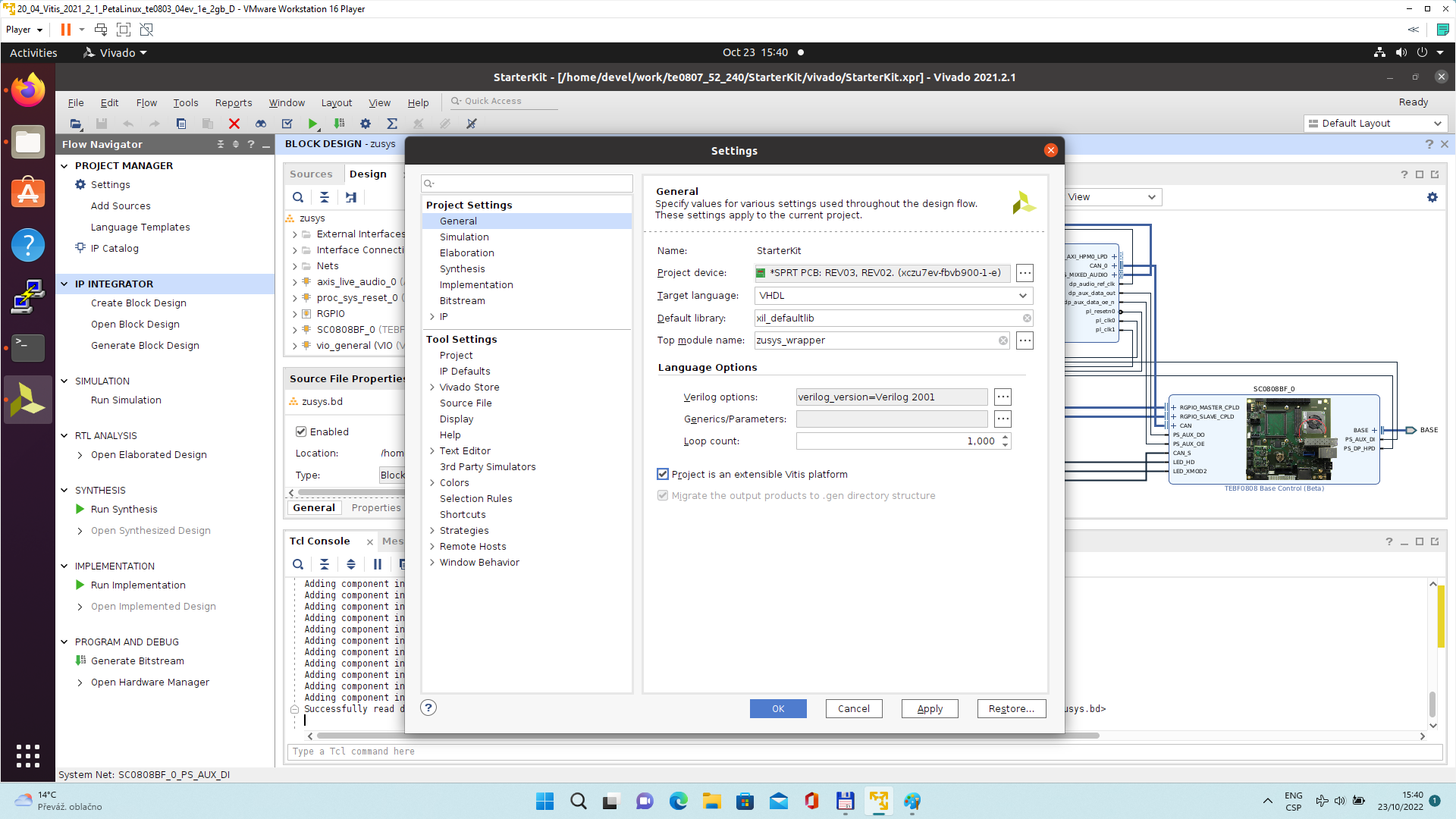
In Vivado project, click in Flow Navigator on Settings. In opened Settings window, select General in Project Settings, select Project is an extensible Vitis platform. Click on OK.
| Scroll Title | ||
|---|---|---|
| ||
|
IP Integrator of project set up as an extensible Vitis platform has an additional Platform Setup window.
Add multiple clocks and processor system reset IPs
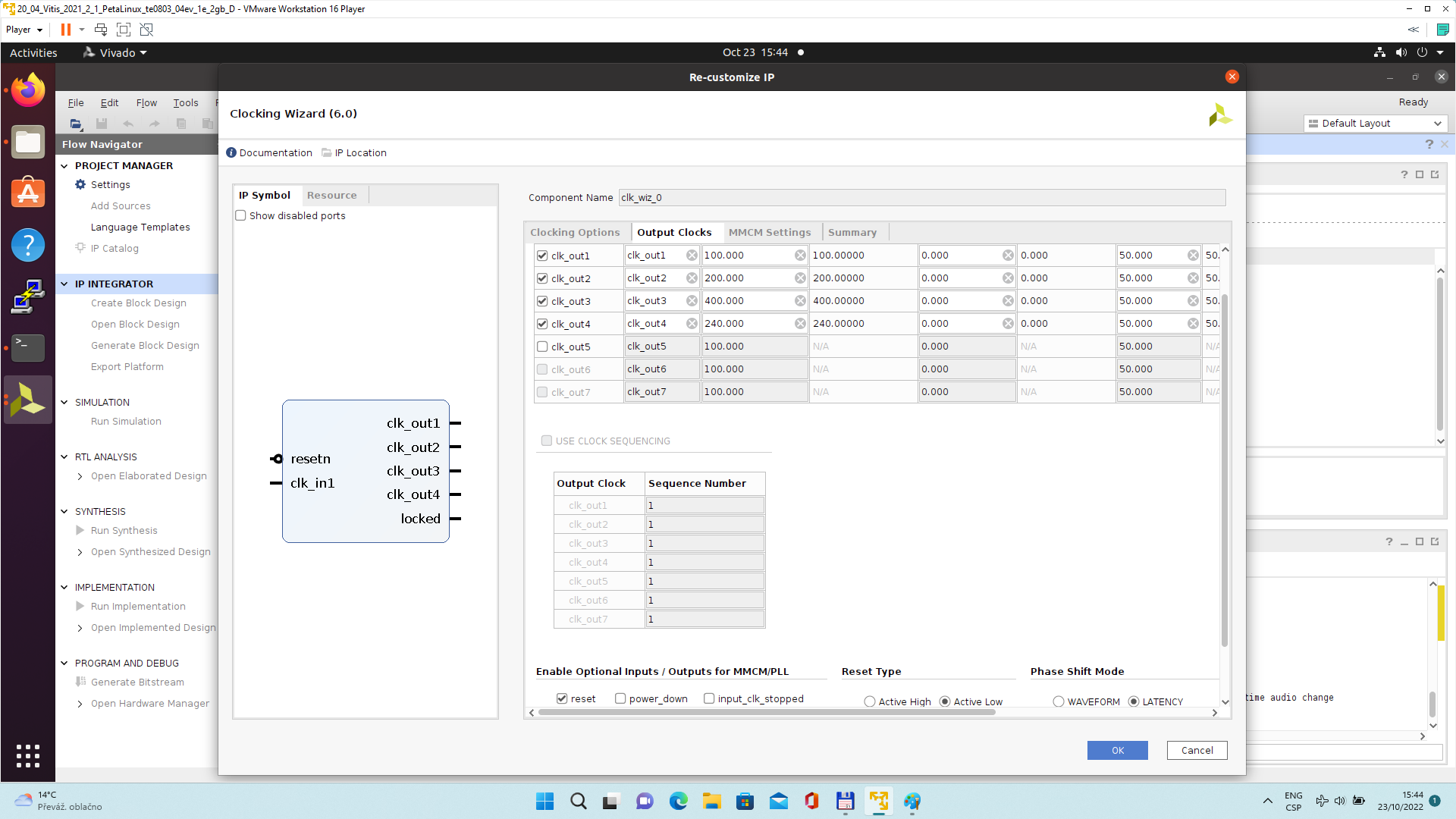
In IP Integrator Diagram Window, right click, select “Add IP” and Add IP and add Clocking Wizard IP clk_wiz_0. Double-click on the IP to Re-customize IP window. Select Output Clocks panel. Select four clocks with frequency 100, 200, 400 and 240 MHz.
100 MHz clock will serve as low speed clock.
200 MHz and 400 MHz clock will serve as clock for possible AI engine.
240 MHz clock will serve as the default extensible platform clock. By default, Vitis will compile HW IPs with this default clock.
Set reset type from the default Active High to Active Low.
| Scroll Title | ||
|---|---|---|
| ||
|
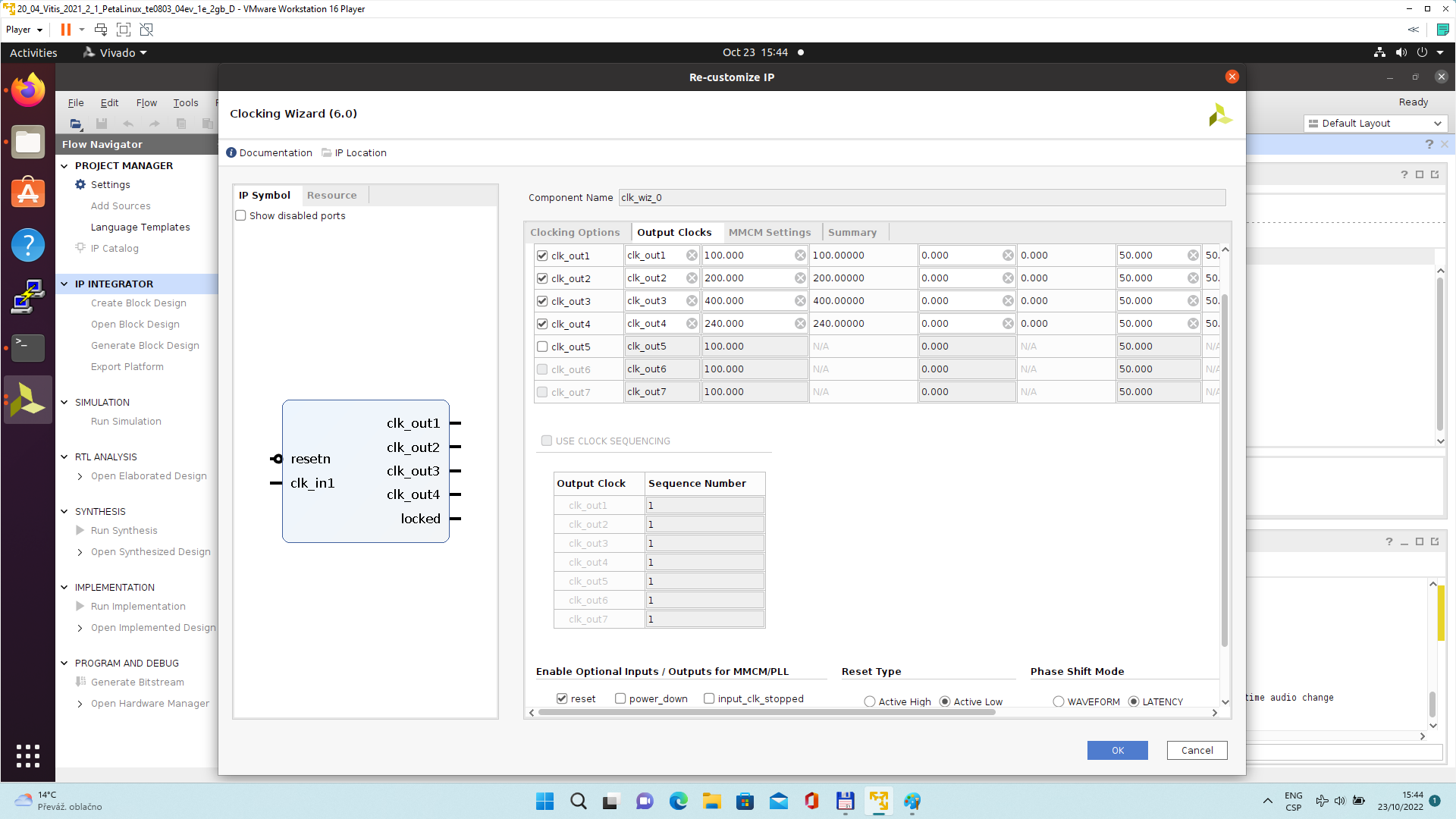
Clik on OK to close the Re-customize IP window.
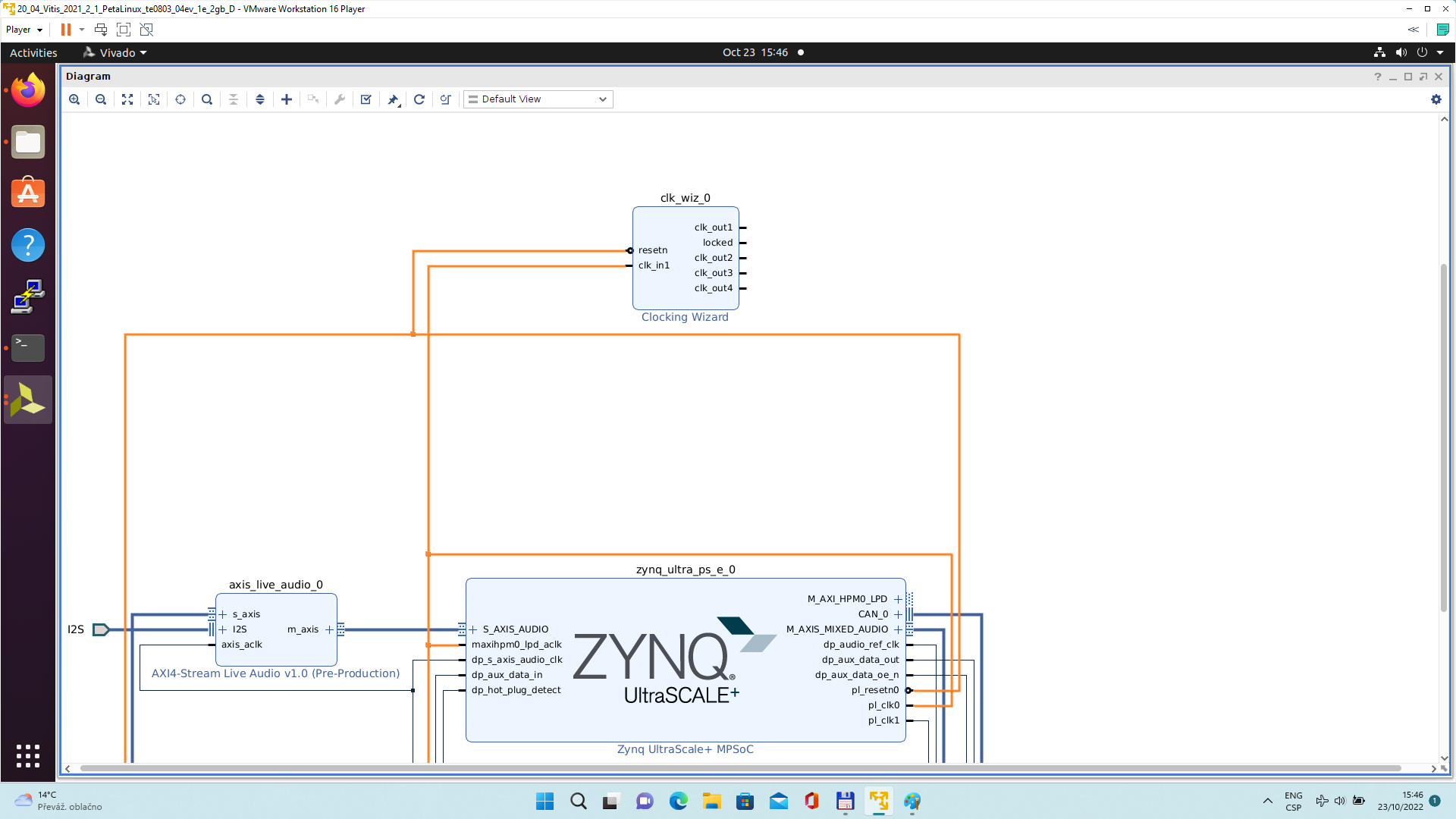
Connect input resetn of clk_wiz_0 with output pl_resetn0 of zynq_ultra_ps_e_0.
Connect input clk_in1 of clk_wiz_0 with output pl_clk0 of zynq_ultra_ps_e_0.
| Scroll Title | ||
|---|---|---|
| ||
|
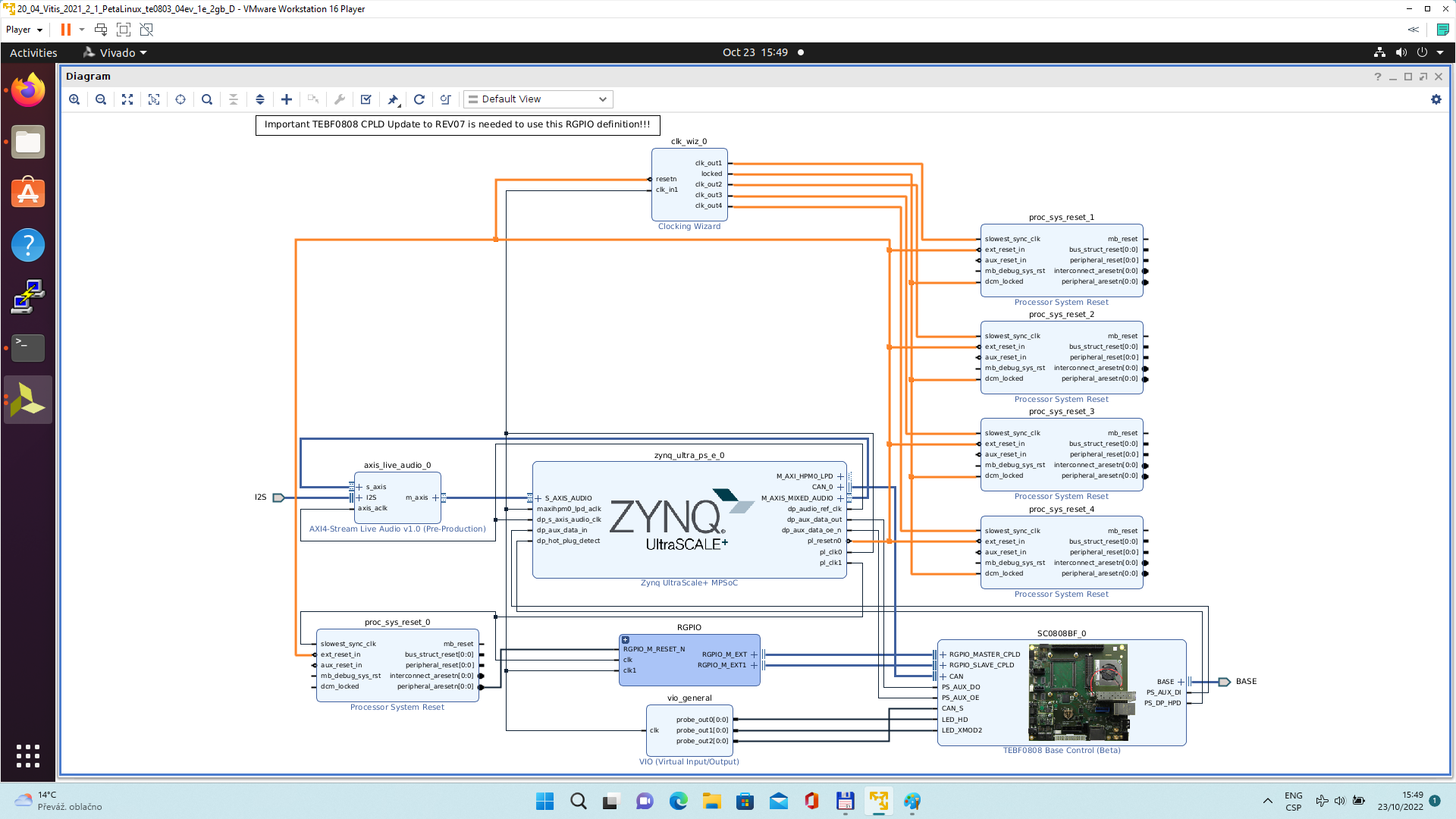
Add and connect four Processor System Reset blocks for each generated clock.
| Scroll Title | ||
|---|---|---|
| ||
|
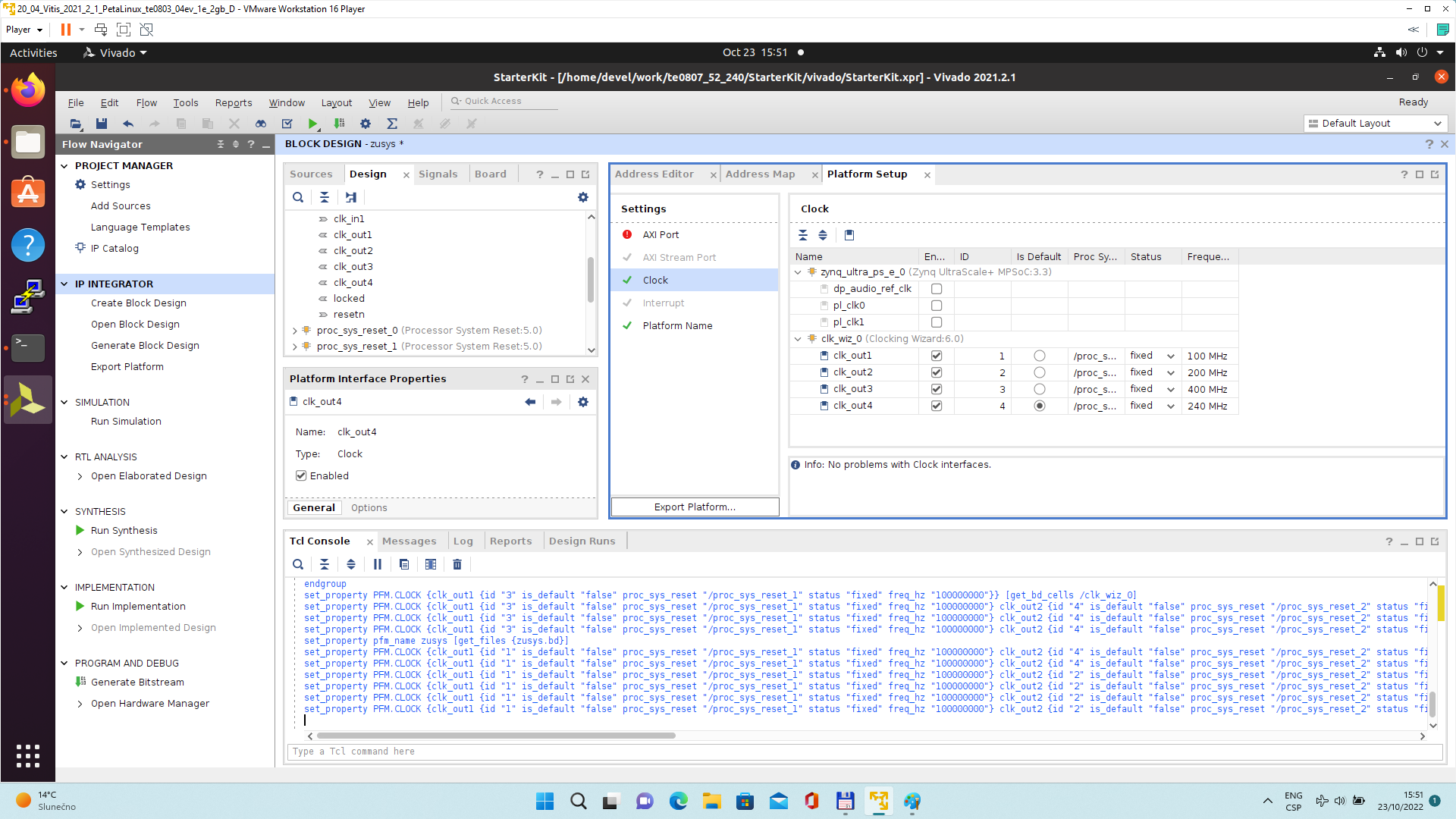
Open Platform Setup window of IP Integrator to define Clocks. In Settings, select Clock.
In “Enabled” column select all four defined clocks clk_out1, clk_out2, clk_out3, clk_out4 of clk_wiz_0 block.
In “ID” column keep the default Clock ID: 1, 2, 3, 4
In “Is Default” column, select clk_out4 (with ID=4) as the default clock. One and only one clock must be selected as default clock.
| Scroll Title | ||
|---|---|---|
| ||
|
Disconnect input pin maxihpm0_lpd_aclk of zynq_ultra_ps_e_0 from the 100 MHz clock net. This net is driven by clock output pl_clk0 of zynq_ultra_ps_e_0.
Connect input pin maxihpm0_lpd_aclk of zynq_ultra_ps_e_0 to the 240 MHz clk_out4 of clk_wiz_0 IP block.
These two modifications are made to support the axi-lite interface of an interrupt controller operating at 240 MHz clock, identical with the default extendable platform clock.
| Scroll Title | ||
|---|---|---|
| ||
|
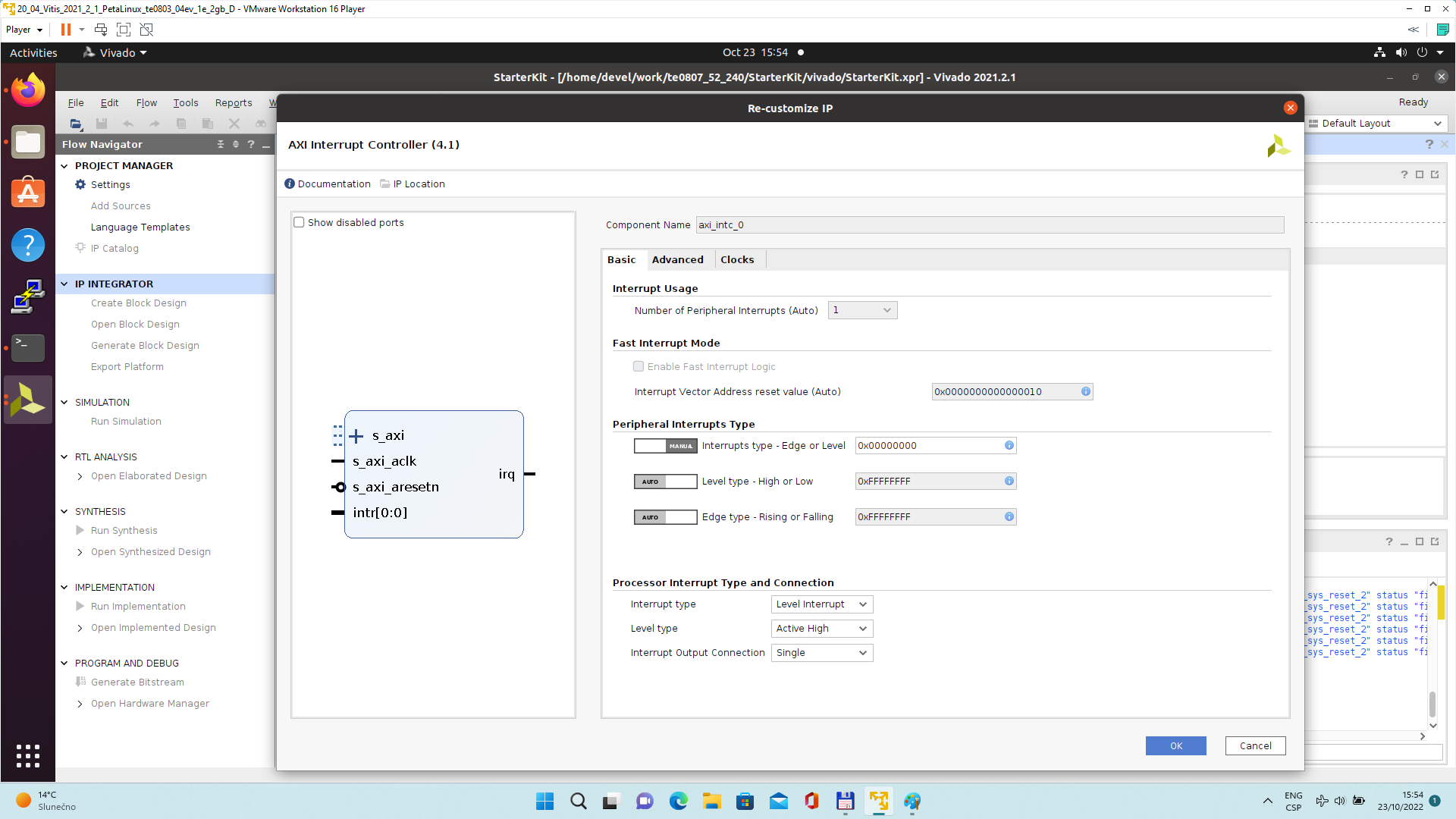
Add, customize and connect the AXI Interrupt Controller
Add AXI Interrupt Controller IP axi_intc_0.
Double-click on axi_intc_0 to re-customize it.
In “Processor Interrupt Type and Connection” section select the “Interrupt Output Connection” from “Bus” to “Single”.
In “Peripherial Interrupt Type” section, change the “Interrupts Types Edge or Level” from AUTO to MANUAL. Change the corresponding value from 0xFFFFFFFF to 0x00000000.
Click on OK to accept these changes.
| Note |
|---|
| This re-configuration is manually setting all interrupts as level interrupts. With this setting, the PetaLinux automatically creates correct description of the interrupt controller in the device tree. The Vitis extensible flow generates HW IP blocks with level interrupts. |
| Note |
|---|
| In case of user defined edge interrupts, the corresponding interrupt description will be added in an customised, interrupt controller description section of the user-defined device tree file ~/work/te0807_52_240/StarterKit/os/petalinux/project-spec/meta-user/ recipes-bsp/device-tree/files/system-user.dtsi For the default extensible te0807_52_240_pfm platform it is not needed. |
| Scroll Title | ||
|---|---|---|
| ||
 |
Connect interrupt controller clock input s_axi_aclk of axi_intc_0 to clock output dlk_out4 of clk_wiz_0. It is the default, 240 MHz clock of the extensible platform.
Connect interrupt controller input s_axi_aresetn of axi_intc_0 to output peripheral_aresetn[0:0] of proc_sys_reset_4 . It is the reset block for default, 240 MHz clock of the extensible platform.
| Scroll Title | ||
|---|---|---|
| ||
 |
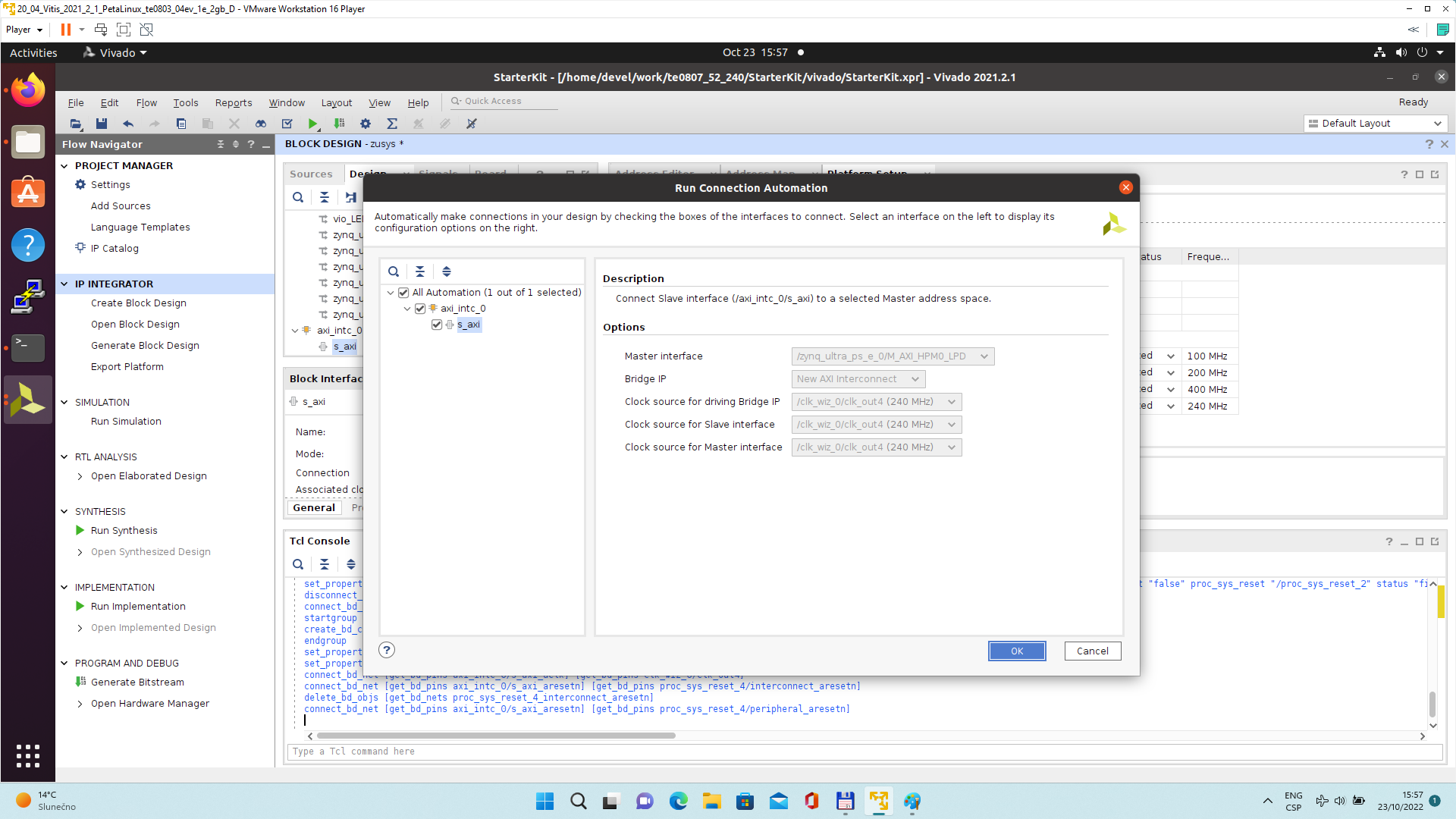
Use the Run Connection Automation wizard to connect the axi lite interface of interrupt controller axi_intc_0 to zynq_ultra_ps_e_0. It is available in green line in top of the Diagram window.
In Run Connection Automaton window, click OK.
| Scroll Title | ||
|---|---|---|
| ||
 |
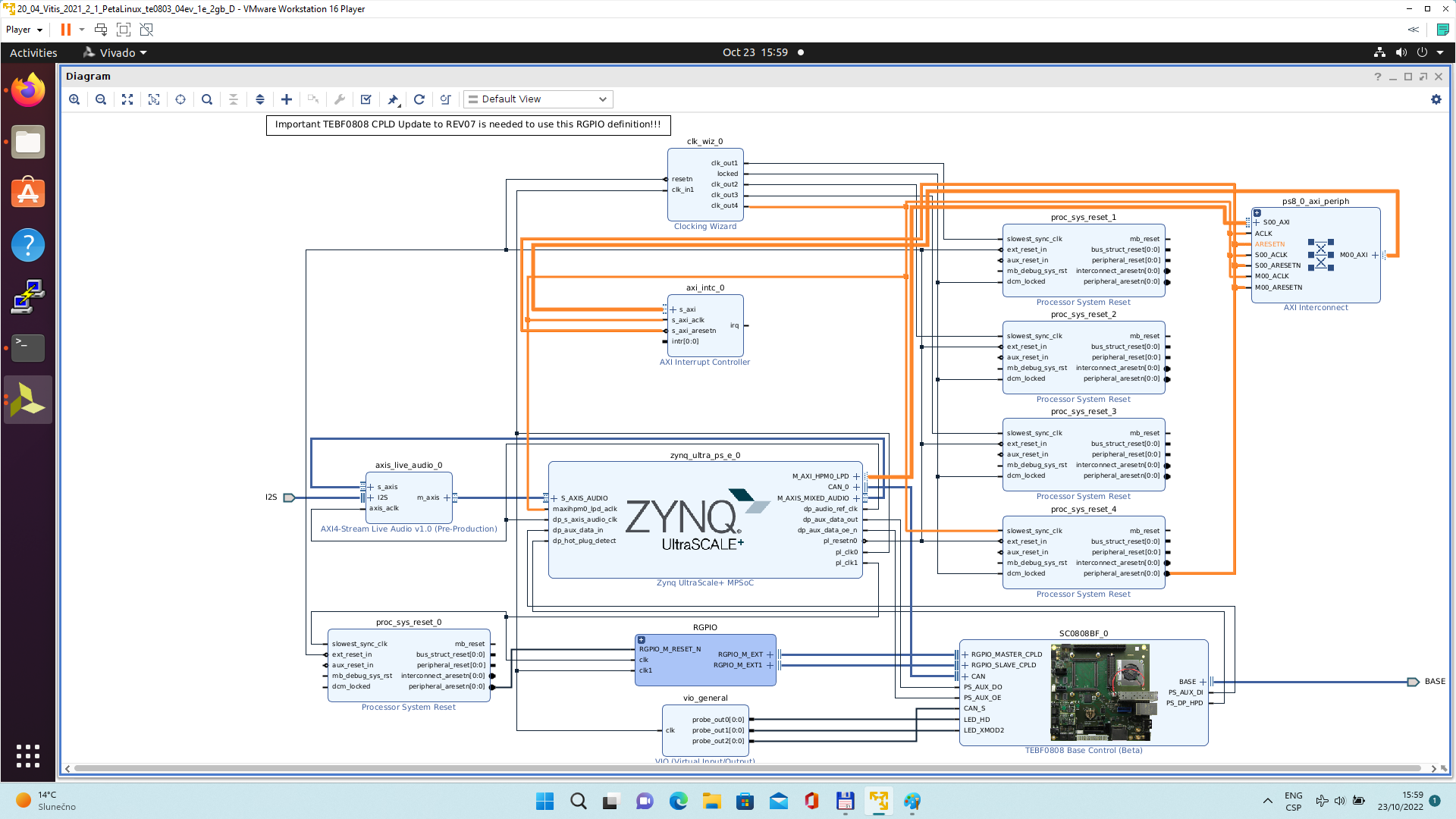
New AXI interconnect ps_8_axi_periph is created and related connections are generated.
| Scroll Title | ||
|---|---|---|
| ||
 |
Vitis extensible design flow will be expanding the AXI interconnect ps_8_axi_periph for interfacing and configuration of registers of generated HW IP blocks with the default extensible platform clock 240 MHz.
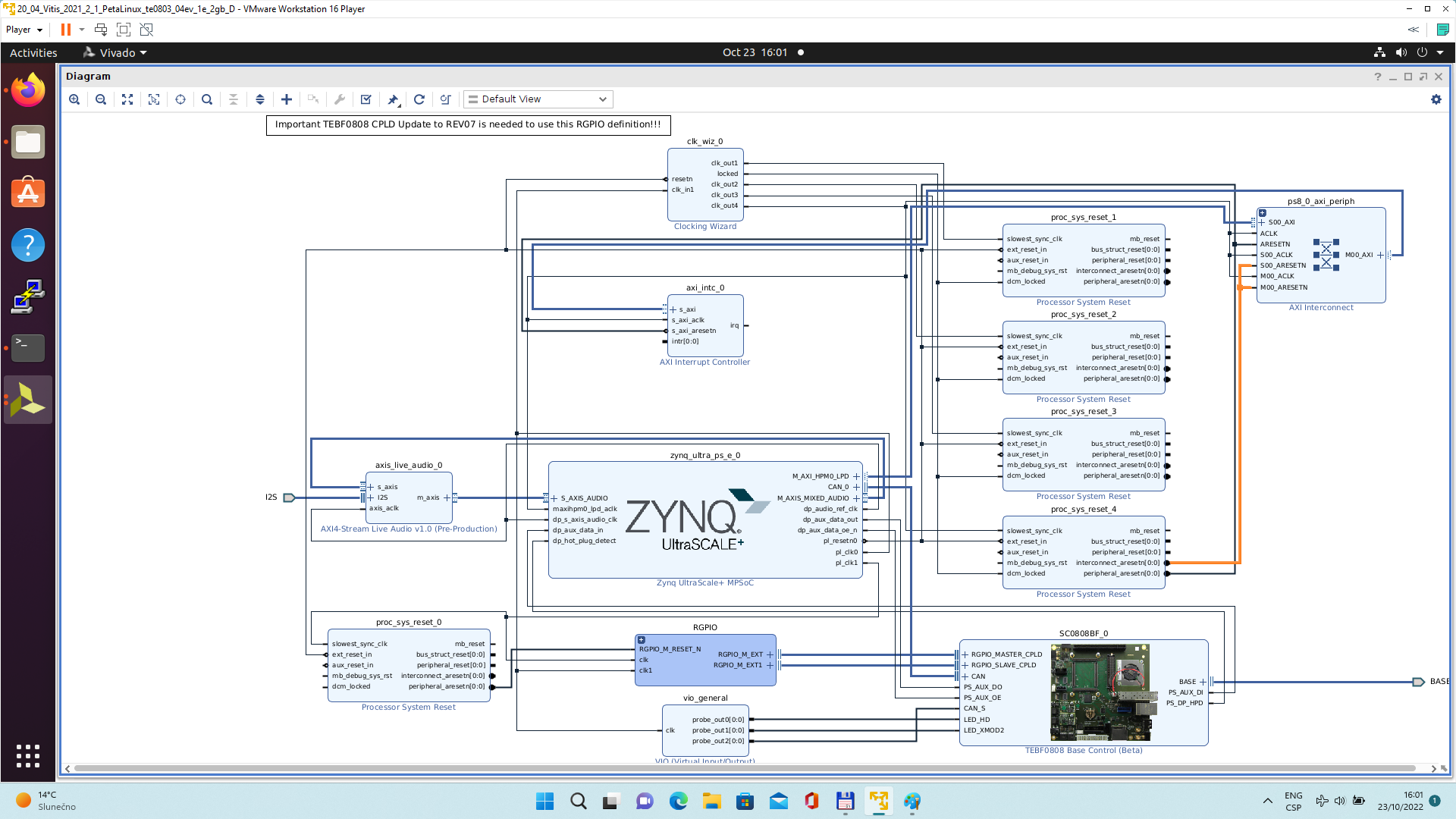
Modify the automatically generated reset network of AXI interconnect ps_8_axi_periph IP.
Disconnect input S00_ARESETN of ps_8_axi_periph from the network driven by output peripherial_aresetn[0:0] of proc_sys_reset_4 block.
Connect input S00_ARESETN of ps_8_axi_periph block with output interconnect_aresetn[0:0] of proc_sys_reset_4 block.
Disconnect input M00_ARESETN of ps_8_axi_periph block from the network driven by output peripherial_aresetn[0:0] of proc_sys_reset_4 block.
Connect input M00_ARESETN of ps_8_axi_periph to output interconnect_aresetn[0:0] of proc_sys_reset_4 block.
This modification will make the reset structure of the AXI interconnect ps_8_axi_periph block identical to the future extensions generated by the Vitis extensible design flow.
| Scroll Title | ||
|---|---|---|
| ||
 |
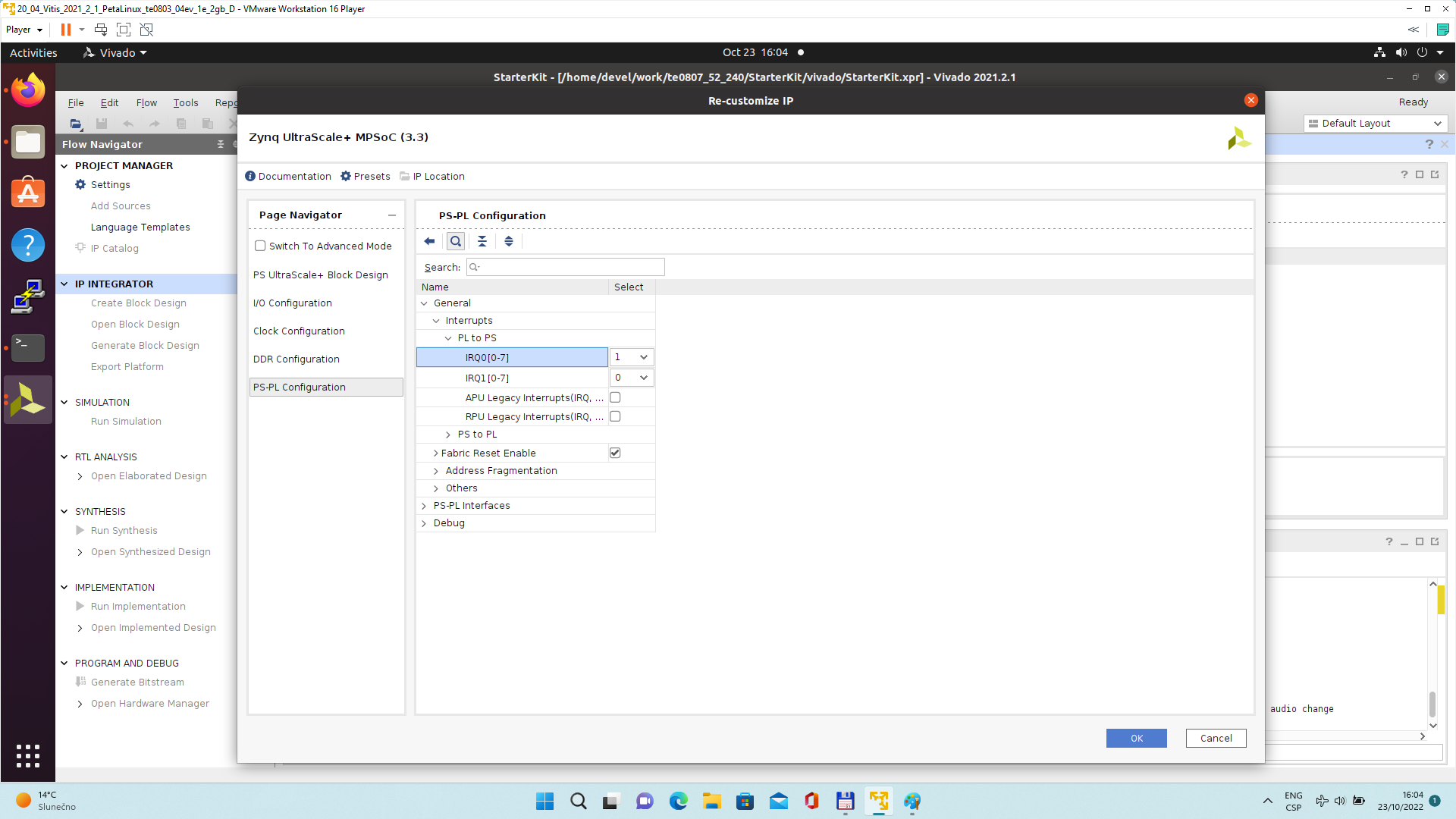
Double-click on zynq_ultra_ps_e_0 to re-customize it by enabling of an interrupt input pl_ps_irq0[0:0]. Click OK.
| Scroll Title | ||
|---|---|---|
| ||
 |
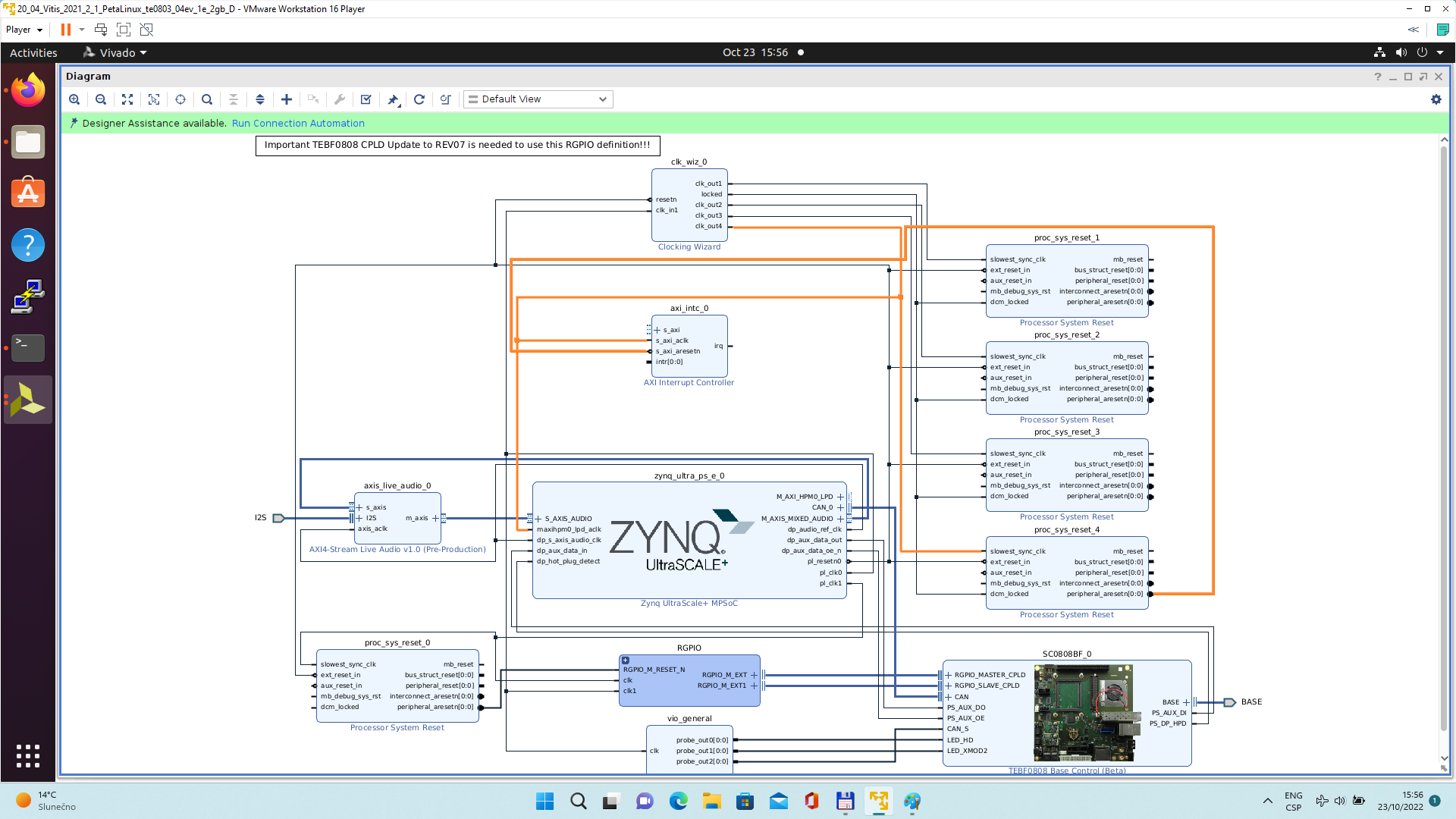
Connect the interrupt input pl_ps_irq0[0:0] of zynq_ultra_ps_e_0 block with output irq of axi_intc_0 block.
| Scroll Title | ||
|---|---|---|
| ||
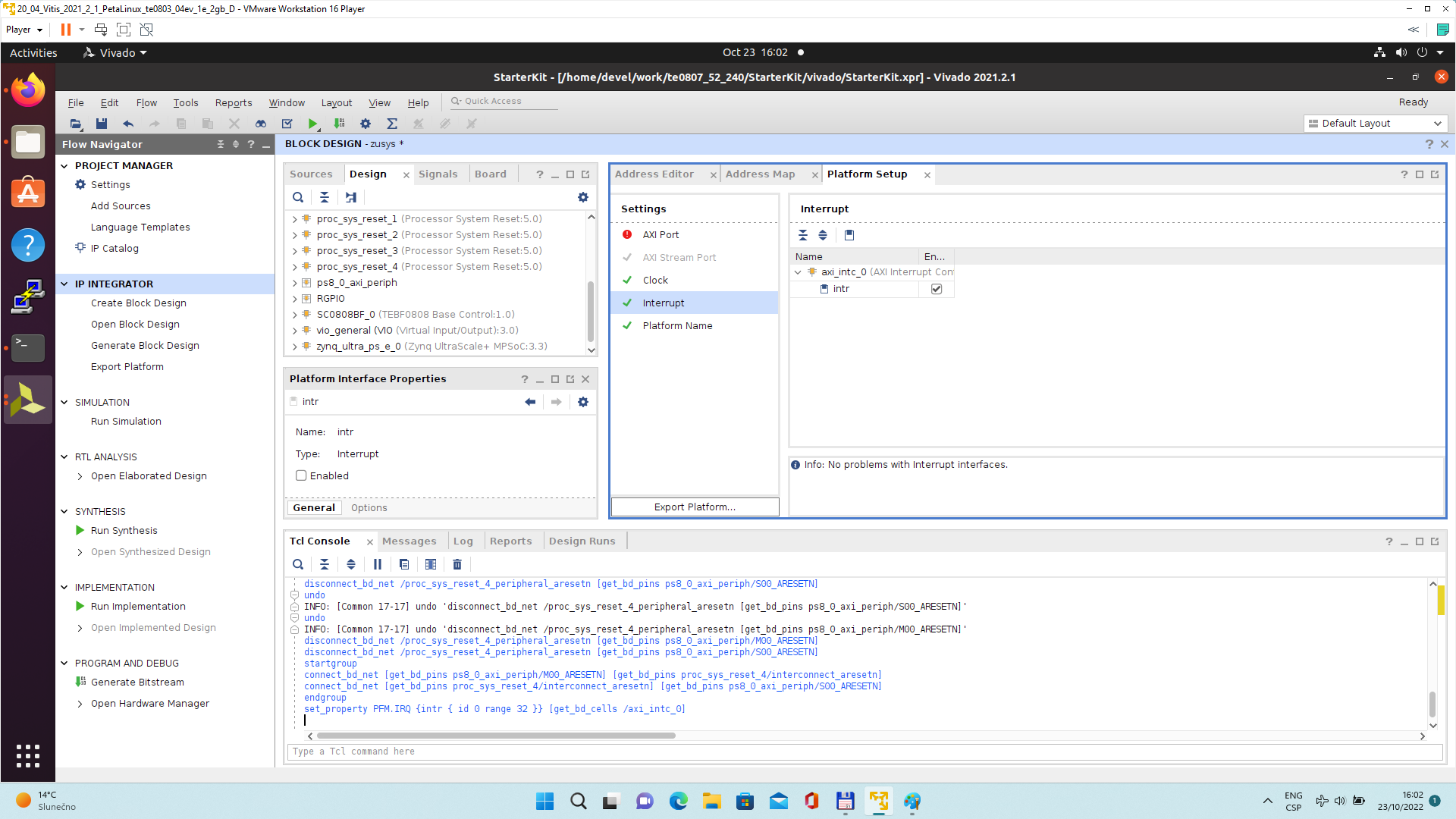 |
In Platform Setup, select “Interrupt” and enable intr in the “Enabled” column.
| Scroll Title | ||
|---|---|---|
| ||
 |
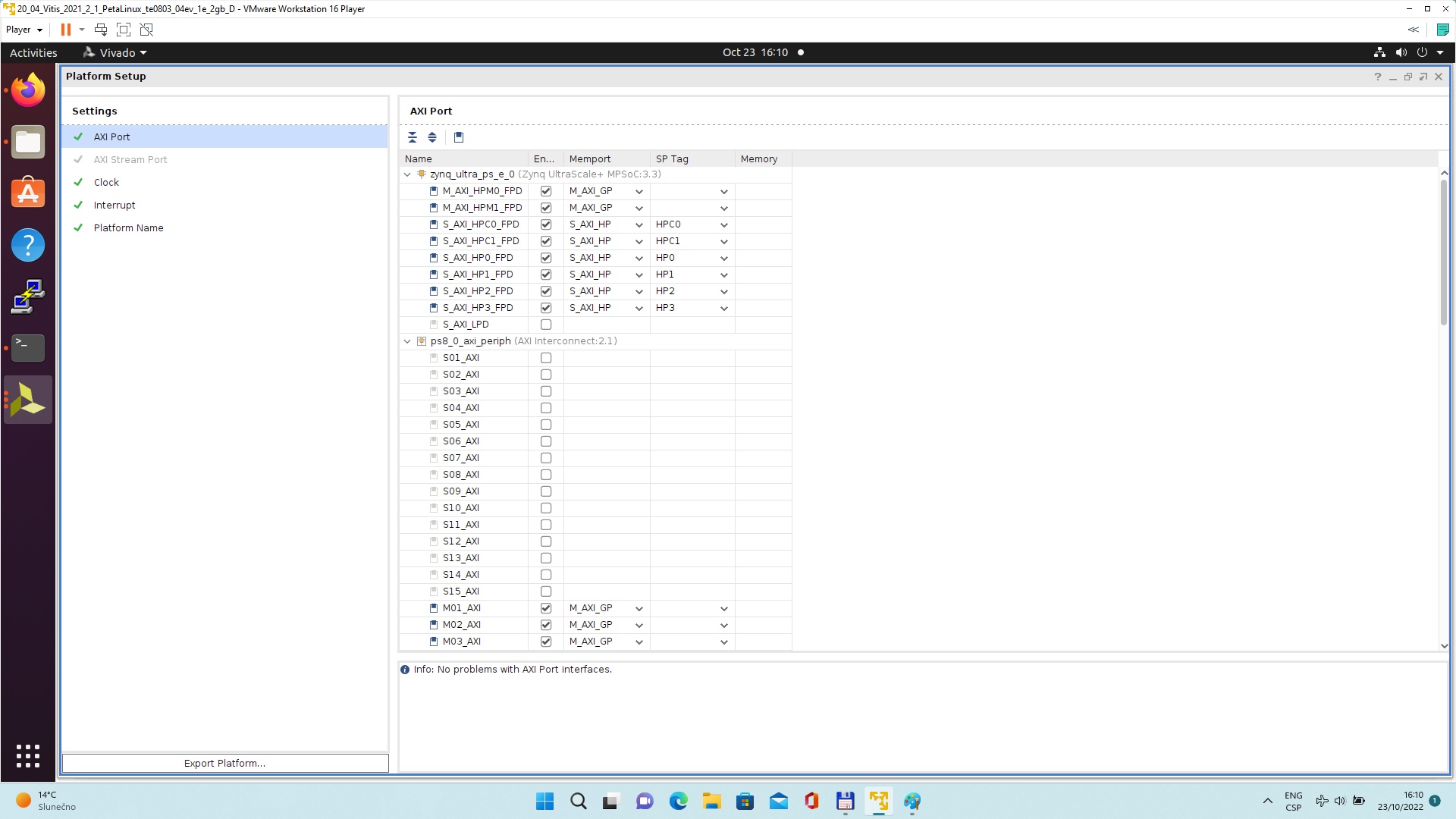
In Platform Setup, select AXI Port for zynq_ultra_ps_e_0:
Select M_AXI_HPM0_FPD and M_AXI_HPM1_FPD in column “Enabled”.
Select S_AXI_HPC0_FPD and S_AXI_HPC1_FPD in column “Enabled”.
For S_AXI_HPC0_FPD, change S_AXI_HPC to S_AXI_HP in column “Memport”.
For S_AXI_HPC1_FPD, change S_AXI_HPC to S_AXI_HP in column “Memport”.
Select S_AXI_HP0_FPD, S_AXI_HP1_FPD, S_AXI_HP2_FPD, S_AXI_HP3_FPD in column “Enabled”.
Type into the “sptag” column the names for these 6 interfaces so that they can be selected by v++ configuration during linking phase. HPC0, HPC1, HP0, HP1, HP2, HP3
| Scroll Title | ||
|---|---|---|
| ||
|
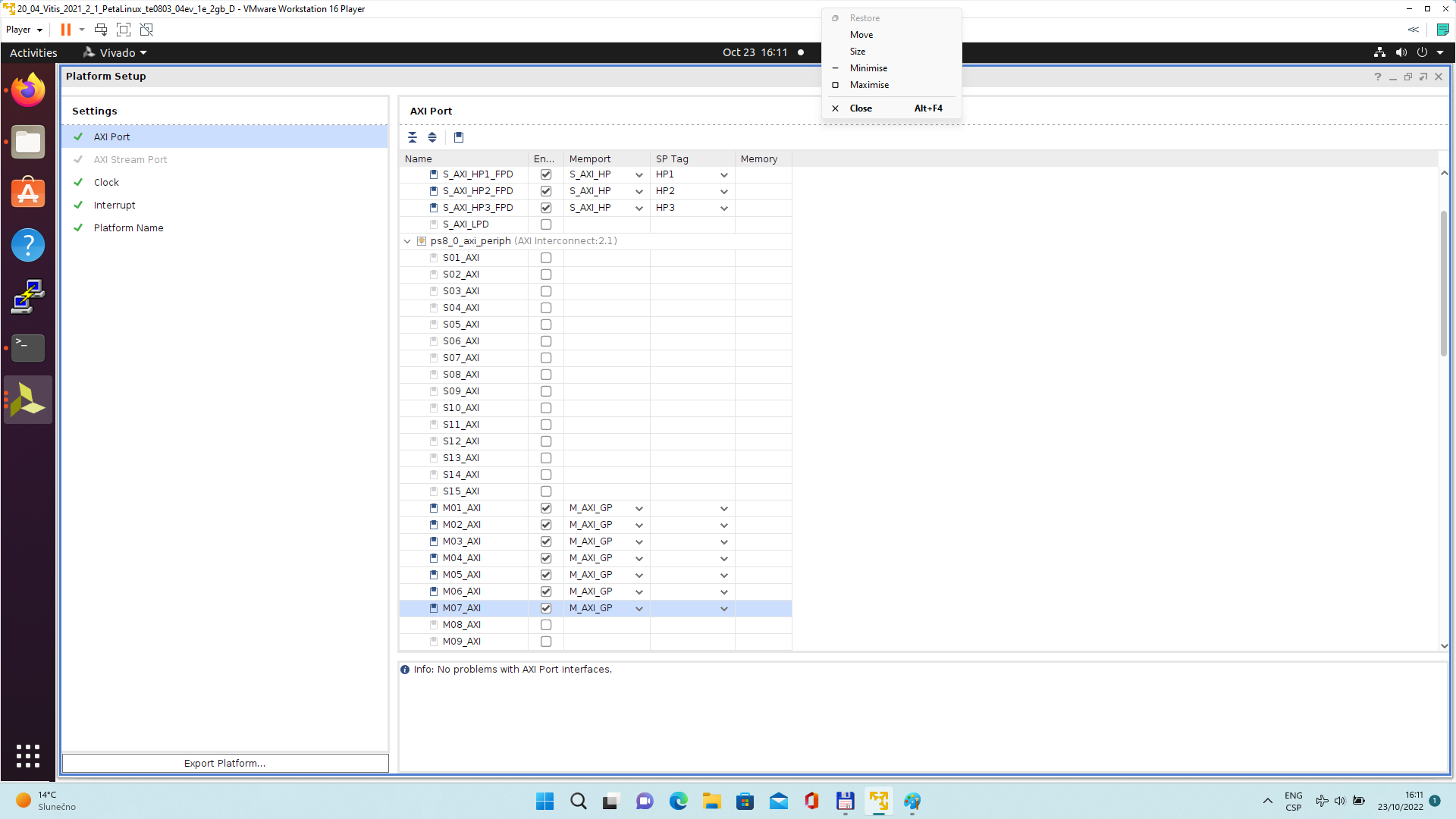
In “Platform Setup”, select AXI Ports for ps8_0_axi_periph:
Select M01_AXI, M02_AXI, M03_AXI, M04_AXI, M05_AXI, M06_AXI and M07_AXI in column “Enabled”.
| Scroll Title | ||
|---|---|---|
| ||
 |
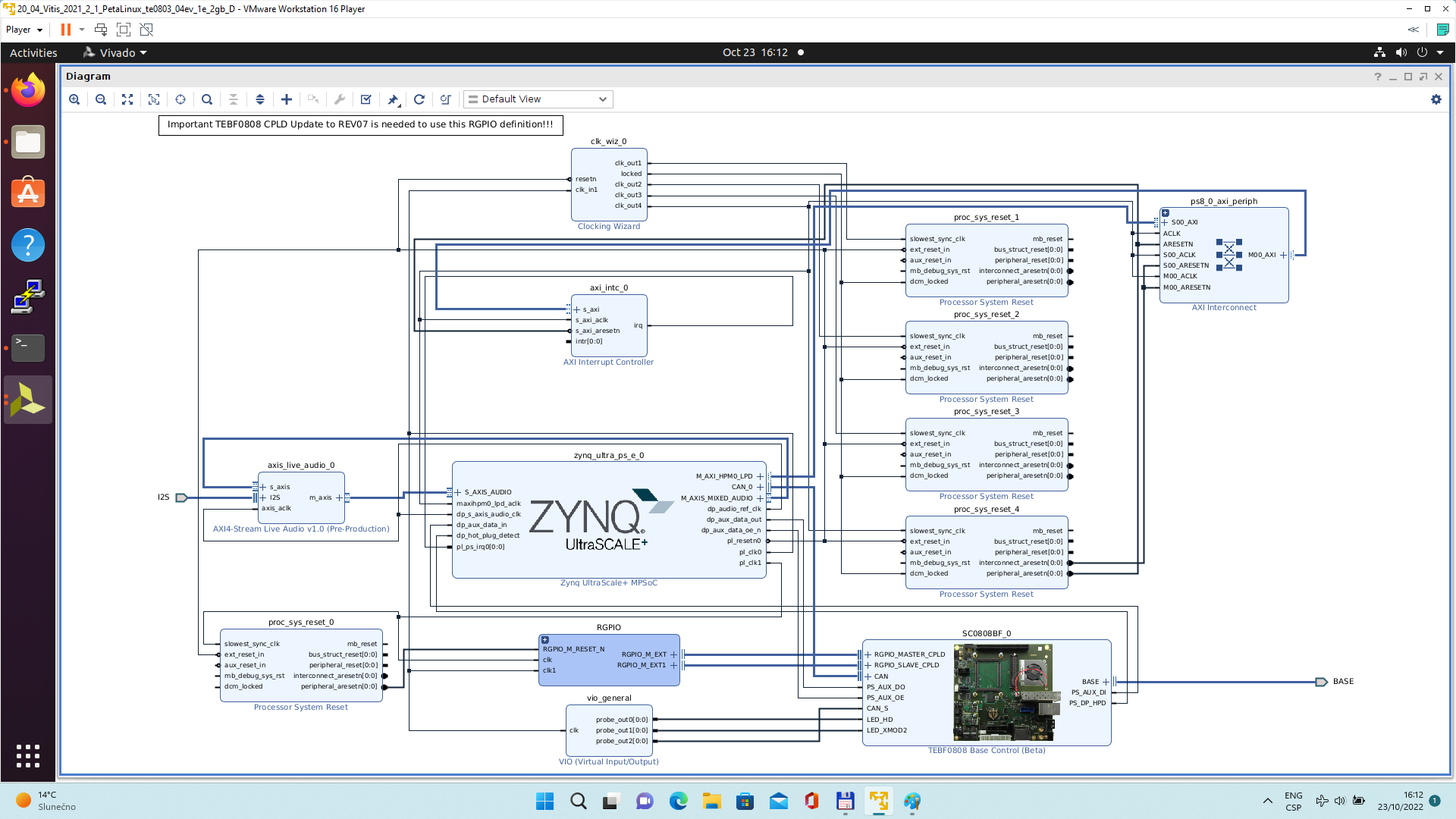
The modifications of the default design for the extensible platform are completed, now.
In Vivado, save block design by clicking on icon “Save Block Design”.
Continue the design path with Validate Design.
Validate Design
| Scroll Ignore | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||
Results of HW creation via Manual Track or Fast Track are identical.
Open diagram by clicking on zusys.bd if not already open.
In Diagram window, validate design by clicking on “Validate Design” icon.
| Scroll Title | ||
|---|---|---|
| ||
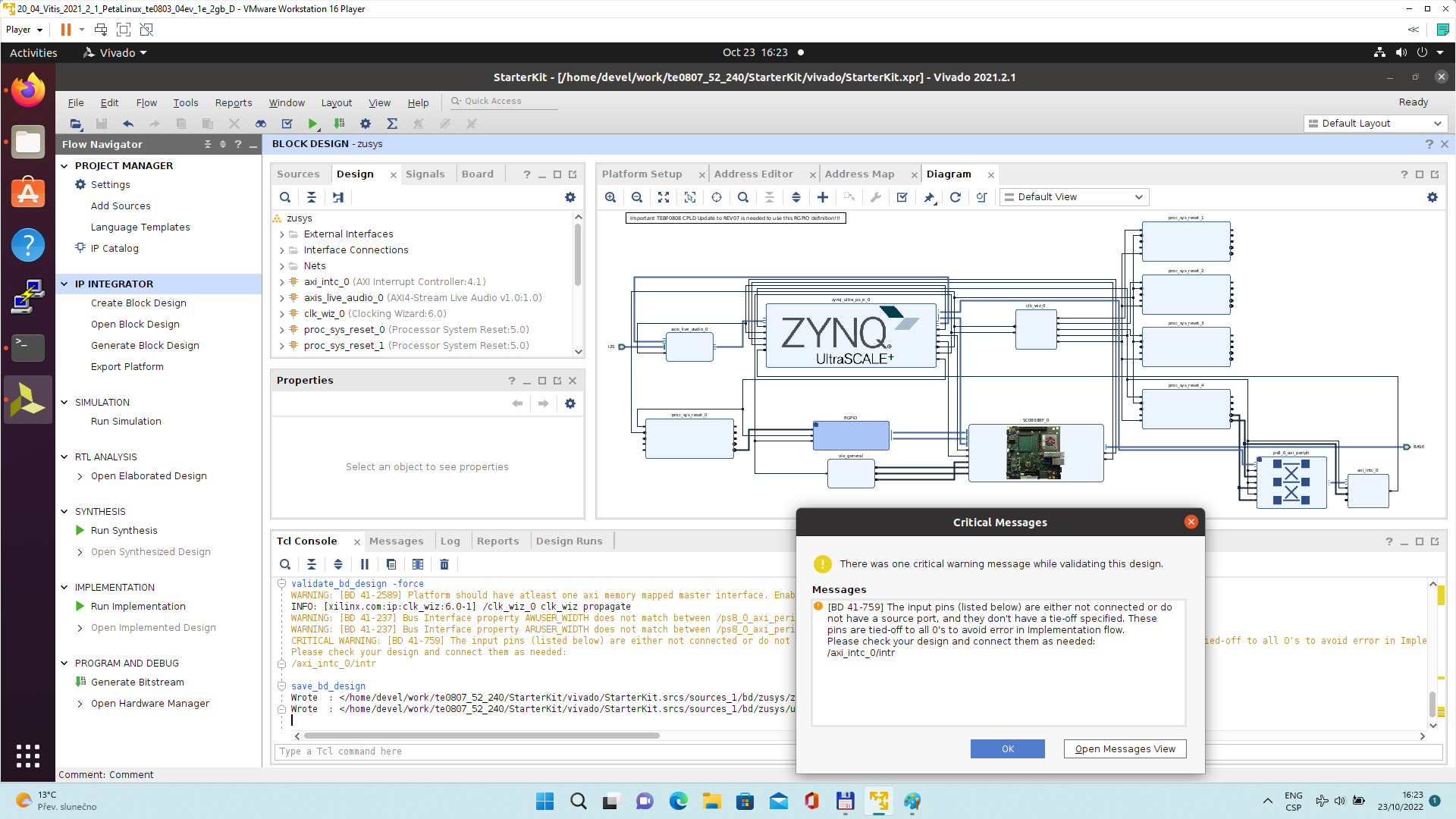 |
Received Critical Messages window indicates that input intr[0:0] of axi_intc_0 is not connected. This is expected. The Vitis extensible design flow will connect this input to interrupt outputs from generated HW IPs.
Click OK.
| Warning |
|---|
Known Issue: Sometimes an error in validation process may occur reporting create_pfm function is not known. Workaroud is to close Vivado tool and reopen again to correclty load platform export API. |
| Note |
|---|
| You can generate pdf of the block diagram by clicking to any place in diagram window and selecting “Save as PDF File”. Use the offered default file name: ~/work/te0807_52_240/StarterKit/vivado/zusys.pdf |
Compile Created HW and Custom SW with Trenz Scripts
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
In Vivado Tcl Console, type following script and execute it by Enter. It will take some time to compile HW. HW design and to export the corresponding standard XSA package with included bitstream.
| Code Block | ||
|---|---|---|
| ||
TE::hw_build_design -export_prebuilt |
An archive for standard non-extensible system is created:
~/work/te0807_52_240/StarterKit/vivado/StarterKit_7ev_1e_4gb.xsa
In Vivado Tcl Console, type the following script and execute it by Enter. It will take some time to compile.
| Code Block | ||
|---|---|---|
| ||
TE::sw_run_vitis -all |
After the script controlling SW compilation is finished, the Vitis SDK GUI is opened.
Close the Vitis “Welcome” page.
Compile the two included SW projects.
Standalone custom Vitis platform TE0807-03-7DE21-A has been created and compiled.
| Scroll Title | ||
|---|---|---|
| ||
 |
The TE0807-03-7DE21-A Vitis platform includes Trenz Electronic custom first stage boot loader in folder zynqmp_fsbl. It includes SW extension specific for the Trenz module initialisation.
This custom zynqmp_fsbl project has been compiled into executable file fsbl.elf. It is located in: ~/work/te0807_52_240/StarterKit/prebuilt/software/7ev_1e_4gb/fsbl.elf
This customised first stage boot loader is needed for the Vitis extensible platform.
We have used the standard Trenz scripts to generate it for next use in the extensible platform.
Exit the opened Vitis SDK project.
In Vivado top menu select “File File -> Close Project” to Project to close project. Click OK.
In Vivado top menu select “File File -> Exit” to Exit to close Vivado. Click OK.
The exported Vitis Extensible Hardware platform named StarterKit_7ev_1e_4gb.xsa can be found in vivado folder.
Copy Created Custom First Stage Boot Loader
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Up to now, StarterKit directory has been used for all development.
~/work/te0807_52_240/StarterKit
Create new folders:
~/work/te0807_52_240/StarterKit_pfm/pfm/boot
~/work/te0807_52_240/StarterKit_pfm/pfm/sd_dir
Copy the recently created custom first stage boot loader executable file from
~/work/te0807_52_240/StarterKit/prebuilt/software/7ev_1e_4gb/fsbl.elf
to
~/work/te0807_52_240/StarterKit_pfm/pfm/boot/fsbl.elf
Building Platform OS and SDK
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Configuration of the Default Trenz Petalinux for the Vitis Extensible Platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Change directory to the default Trenz Petalinux folder
~/work/te0807_52_240/StarterKit/os/petalinux
Source Vitis and Petalinux scripts to set environment for access to Vitis and PetaLinux tools.
| Code Block | ||
|---|---|---|
| ||
$ source /tools/Xilinx/Vitis/2021.2/settings64.sh $ source ~/petalinux/2021.2/settings.sh |
Configure petalinux with the StarterKit_7ev_1e_4gb.xsa for the extensible design flow by executing:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-config --get-hw-description=~/work/te0807_52_240/StarterKit/vivado |
Select Exit -> Yes to close this window.
Customize Root File System, Kernel, Device Tree and U-boot
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
In text editor, append definition of 32 interrupts by this text:
| Code Block | ||
|---|---|---|
| ||
&amba { zyxclmm_drm {
compatible = "xlnx,zocl";
status = "okay";
reg = <0x0 0xA0000000 0x0 0x10000>;
interrupt-parent = <&axi_intc_0>;
interrupts = <0 4>, <1 4>, <2 4>, <3 4>,
<4 4>, <5 4>, <6 4>, <7 4>,
<8 4>, <9 4>, <10 4>, <11 4>,
<12 4>, <13 4>, <14 4>, <15 4>,
<16 4>, <17 4>, <18 4>, <19 4>,
<20 4>, <21 4>, <22 4>, <23 4>,
<24 4>, <25 4>, <26 4>, <27 4>,
<28 4>, <29 4>, <30 4>, <31 4>;
};
}; |
to the system-user.dtsi file located in folder:
~/work/te0807_52_240/StarterKit/os/petalinux/project-spec/meta-user/
recipes-bsp/device-tree/files/system-user.dtsi
Download the Vitis-AI 2.0 repository.
In browser, open page:
https://github.com/Xilinx/Vitis-AI/tree/2.0
Clik on green Code button and download Vitis-AI-2.0.zip file.
Unzip Vitis-AI-2.0.zip file to directory ~/Downloads/Vitis-AI.
Copy ~/Downloads/Vitis-AI to ~~/vitis_ai_2_0 0
Delete Vitis-AI-2.0.zip, delete ~/Downloads/Vitis-AI , clean trash.
The directory ~/vitis_ai_2_0 contains the Vitis-AI 2.0 framework, now.
To install the Vitis-AI 2.0 version of shared libraries into rootfs (when generating system image by PetaLinux) we have to copy recepies recipes-vitis-ai to the Petalinux project :
Copy
~/vitis_ai_2_0/tools/Vitis-AI-Recipes/recipes-vitis-ai
to
~/work/te0807_52_240/StarterKit/os/petalinux/project-spec/meta-user/
In text editor, append these lines:
| Code Block | ||
|---|---|---|
| ||
CONFIG_xrt CONFIG_xrt-dev CONFIG_zocl CONFIG_opencl-clhpp-dev CONFIG_opencl-headers-dev CONFIG_packagegroup-petalinux-opencv CONFIG_packagegroup-petalinux-opencv-dev CONFIG_dnf CONFIG_e2fsprogs-resize2fs CONFIG_parted CONFIG_resize-part CONFIG_packagegroup-petalinux-vitisai CONFIG_packagegroup-petalinux-self-hosted CONFIG_cmake CONFIG_packagegroup-petalinux-vitisai-dev CONFIG_mesa-megadriver CONFIG_packagegroup-petalinux-x11 CONFIG_packagegroup-petalinux-v4lutils CONFIG_packagegroup-petalinux-matchbox CONFIG_vitis-ai-library CONFIG_vitis-ai-library-dev CONFIG_vitis-ai-library-dbg |
to the user-rootfsconfig file:
~/work/te0807_52_240/StarterKit/os/petalinux/project-spec/meta-user/conf/user-rootfsconfig
xrt, xrt-dev and zocl are required for Vitis acceleration flow.
dnf is for package management.
parted, e2fsprogs-resize2fs and resize-part can be used for ext4 partition resize.
Other included packages serve for natively building Vitis AI applications on target board and for running Vitis-AI demo applications with GUI.
The last three packages will enable use of the Vitis-AI 2.0 recepies for installation of the correspoding Vitis-AI 2.0 libraries into rootfs of PetaLinux.
Enable all required packages in Petalinux configuration, from the Ubuntu terminal:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-config -c rootfs |
Select all user packages by typing “y”.All packages will have to have an asterisk.
Still in the RootFS configuration window, go to root directory by select Exit once.
Enable OpenSSH and Disable Dropbear
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Dropbear is the default SSH tool in Vitis Base Embedded Platform. If OpenSSH is used to replace Dropbear, the system could achieve faster data transmission speed over ssh. Created Vitis extensible platform applications may use remote display feature. Using of OpenSSH can improve the display experience.
Go to Image Features.
Disable ssh-server-dropbear and enable ssh-server-openssh and click Exit.
Go to Filesystem Packages-> misc->packagegroup-core-ssh-dropbear and disable packagegroup-core-ssh-dropbear.
Go to Filesystem Packages level by Exit twice.
Go to console -> network -> openssh and enable openssh, openssh-sftp-server, openssh-sshd, and openssh-scp.
Go to root level by selection of Exit four times.
Enable Package Management
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Package management feature can allow the board to install and upgrade software packages on the fly.
In rootfs config go to Image Features and enable package-management and debug_tweaks option
Click OK, Exit twice and select Yes to save the changes.
Disable CPU IDLE in Kernel Config
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
CPU IDLE would cause processors get into IDLE state (WFI) when the processor is not in use. When JTAG is connected, the hardware server on host machine talks to the processor regularly. If it talks to a processor in IDLE status, the system will hang because of incomplete AXI transactions.
So, it is recommended to disable the CPU IDLE feature during project development phase.
It can be re-enabled after the design has completed to save power in final products.
Launch kernel config:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-config -c kernel |
Ensure the following items are TURNED OFF by entering 'n' in the [ ] menu selection:
CPU Power Management -> CPU Idle -> CPU idle PM support
CPU Power Management -> CPU Frequency scaling -> CPU Frequency scaling
Exit and Yes to Save changes.
Add EXT4 rootfs Support
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Let PetaLinux generate EXT4 rootfs. In terminal, execute:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-config |
Go to “Image Image Packaging Configuration”Configuration.
Enter into “Root Root File System Type”Type
Select “Root Root File System Type” EXT4Type EXT4
Change the “Device node” of SD device from the default value
/dev/mmcblk0p2
to new value required for the te0807 modules on tebf0808 carrierTEBF0808 carrier:
/dev/mmcblk1p2
Exit and Yes to save changes.
Let Linux Use EXT4 rootfs During Boot
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
The setting of which rootfs to use during boot is controlled by bootargs. We would change bootargs settings to allow Linux to boot from EXT4 partition.
In terminal, execute:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-config |
Change DTG settings -> Kernel Bootargs -> generate boot args automatically to NO.
Update “User User Set Kernel Bootargs” toBootargs to:
earlycon console=ttyPS0,115200 clk_ignore_unused root=/dev/mmcblk1p2 rw rootwait cma=512M
Click OK, Exit three times and Save.
Build PetaLinux Image
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
In terminal, build the PetaLinux project by executing:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-build |
The PetaLinux image files will be generated in the directory:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux
Generation of PetaLinux takes some time and requires Ethernet connection and sufficient free disk space.
Create Petalinux SDK
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
The SDK is used by Vitis tool to cross compile applications for newly created platfom.
In terminal, execute:
| Code Block | ||
|---|---|---|
| ||
$ petalinux-build --sdk |
The generated sysroot package sdk.sh will be located in directory
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux
Generation of SDK package takes some time and requires sufficient free disk space.
Time needed for these two steps depends also on number of allocated processor cores.
Copy Files for Extensible Platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Copy these four files:
| Scroll Title | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Rename the copied file u-boot-dtb.elf to u-boot.elf
The directory
~/work/te0807_52_240/StarterKit_pfm/pfm/boot
contains these five files:
- bl31.elf
- fsbl.elf
- pmufw.elf
- bl31system.elfdtb
- u-boot.elf
- system.dtb
Copy files:
| Scroll Title | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
Copy file:
| Scroll Title | ||||||
|---|---|---|---|---|---|---|
| ||||||
|
| Note | |||||
|---|---|---|---|---|---|
init.sh is an place-holder for user defined bash code to be executed after the boot:
|
Create Extensible Platform zip File
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Create new directory tree:
~/work/te0807_52_240_move/StarterKit/os/petalinux/images
~/work/te0807_52_240_move/StarterKit/Vivado
~/work/te0807_52_240_move/StarterKit_pfm/pfm/boot
~/work/te0807_52_240_move/StarterKit_pfm/pfm/sd_dir
Copy all files from the directory:
| Scroll Title | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||
|
Zip the directory
~/work/te0807_52_240_move
into ZIP archive:
~/work/te0807_52_240_move.zip
The archive te0807_52_240_move.zip can be used to create extensible platform on the same or on an another PC with installed Ubuntu 20.04 and Vitis tools, with or without installed Petalinux
The archive includes all needed components, including the Xilinx xrt library and the script sdk.sh serving for generation of the sysroot .
The archive has size approximately 3.6 GB and it is valid only for the initially selected module (52).
This is the te0807 HW module with xczu7ev-fbvb900-1-e device with 4 GB memory.
The extensible Vitis platform will have the default clock 240 MHz.
Move the te0807_52_240_move.zip file to an PC disk drive. Delete:
~/work/te0807_52_240_move
~/work/te0807_52_240_move.zip
Clean the Ubuntu Trash.
Generation of SYSROOT
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
This part of development can be direct continuation of the previous Petalinux configuration and compilation steps.
| Note |
|---|
| Alternatively, it is also possible to implement all next steps on an Ubuntu 20.04 without installed PetaLinux. Only the Ubuntu 20.04 and Vitis/Vivado installation is needed. All required files created in the PetaLinux for the specific module (52) are present in the archive: te0807_52_240_move.zip In this case, unzip the archive to the directory: ~/work/te0807_52_240_move and copy all content of directories to ~/work/te0807_52_240 Delete the te0807_52_240_move.zip ZIP file and the ~/work/te0807_52_240_move directory to save filesystem space. |
In Ubuntu terminal, change the working directory to:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux
In Ubuntu terminal, execute script enabling access to Vitis tools.
Execution of script serving for setting up PetaLinux environment is not necessary:
| Code Block | ||
|---|---|---|
| ||
$ source /tools/Xilinx/Vitis/2021.2/settings64.sh |
In Ubuntu terminal, execute script
| Code Block | ||
|---|---|---|
| ||
$ ./sdk.sh -d ~/work/te0807_52_240/StarterKit_pfm |
SYSROOT directories and files for PC and for Zynq Ultrascale+ will be created in:
~/work/te0807_52_240/StarterKit_pfm/sysroots/x86_64-petalinux-linux
~/work/te0807_52_240/StarterKit_pfm/sysroots/cortexa72-cortexa53-xilinx-linux
Once created, do not move these sysroot directories (due to some internally created paths).
Generation of Extensible Platform for Vitis
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
In Ubuntu terminal, change the working directory to:
~/work/te0807_52_240/StarterKit_pfm
Start Vitis tool by executing
| Code Block | ||
|---|---|---|
| ||
$ vitis & |
In Vitis “Launcher”, set the workspace for the extensible platform compilation:
~/work/te0807_52_240/StarterKit_pfm
Click on “Launch” to launch Vitis
Close Welcome page.
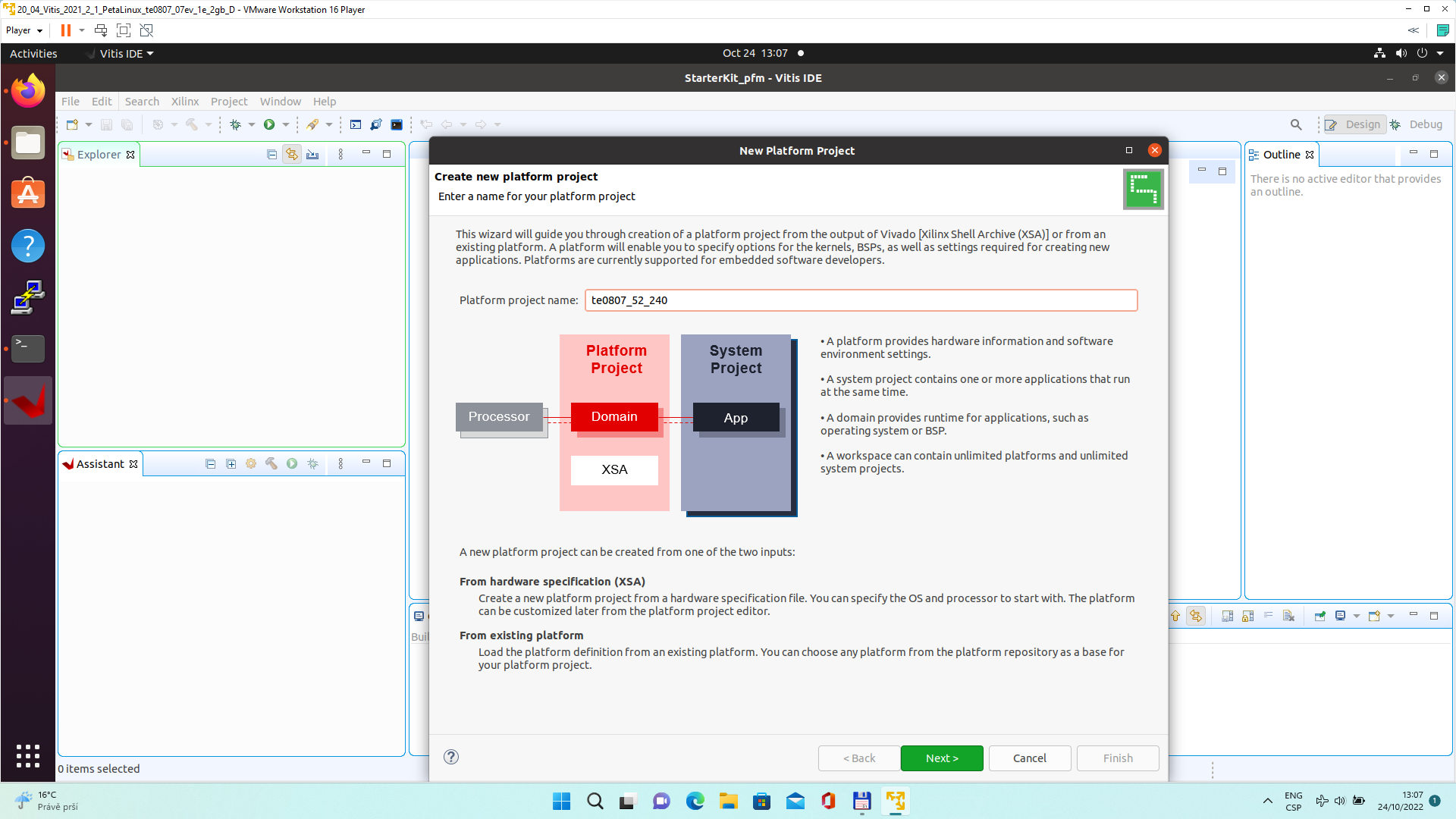
In Vitis, select in the main menu: File -> New -> Platform Project
Type name of the extensible platform: te0807_52_240_pfm. Click Next.
| Scroll Title | ||
|---|---|---|
| ||
 |
Choose for hardware specification for the platform file:
~/work/te0807_52_240/StarterKit/vivado/StarterKit_7ev_1e_4gb.xsa
In “Software specification” select: “linux” linux
In “Boot Components” unselect “Generate Generate boot components” components
(these components have been already generated by Vivado and PetaLinux design flow)
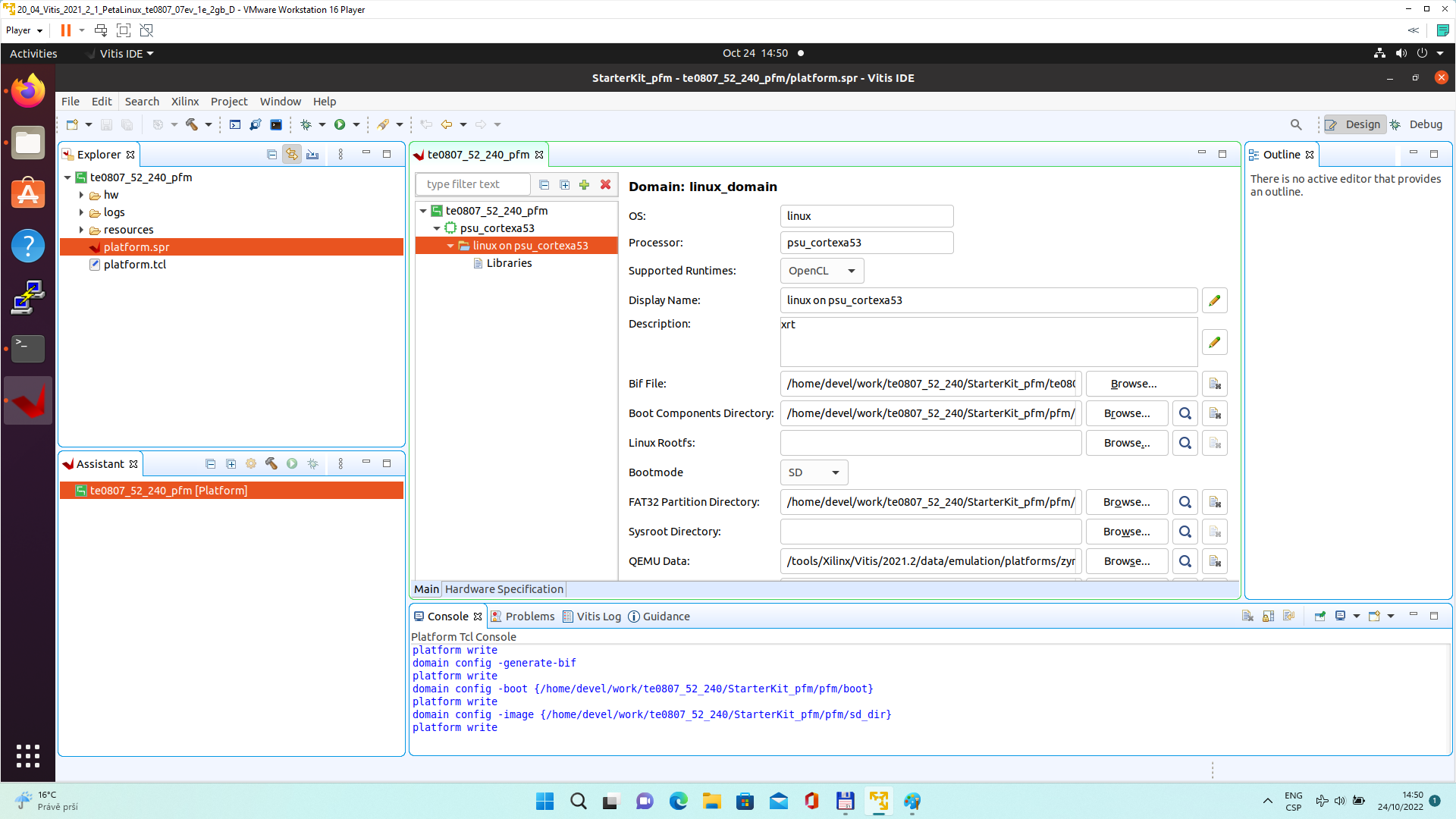
New window te0807_52_240_pfm is opened.
Click on “linux linux on psu_cortex53” cortex53 to open window “DomainDomain: linux_domain”domain
In “Description”: write “xrt” xrt
In “Bif File” find and select the pre-defied option: “Generate Bif” Generate Bif
In “Boot Components Directory” select:
~/work/te0807_52_240/StarterKit_pfm/pfm/boot
In “FAT32 Partition Directory” select:
~/work/te0807_52_240/StarterKit_pfm/pfm/sd_dir
| Scroll Title | ||
|---|---|---|
| ||
 |
In Vitis IDE “Explorer” section, click on te0807_52_240_pfm to highlight it.
Right-click on the highlighted te0807_52_240_pfm and select build project in the open submenu. Platform is compiled in few seconds.
Close Vitis tool by selection: File -> Exit.
| Scroll Title | ||
|---|---|---|
| ||
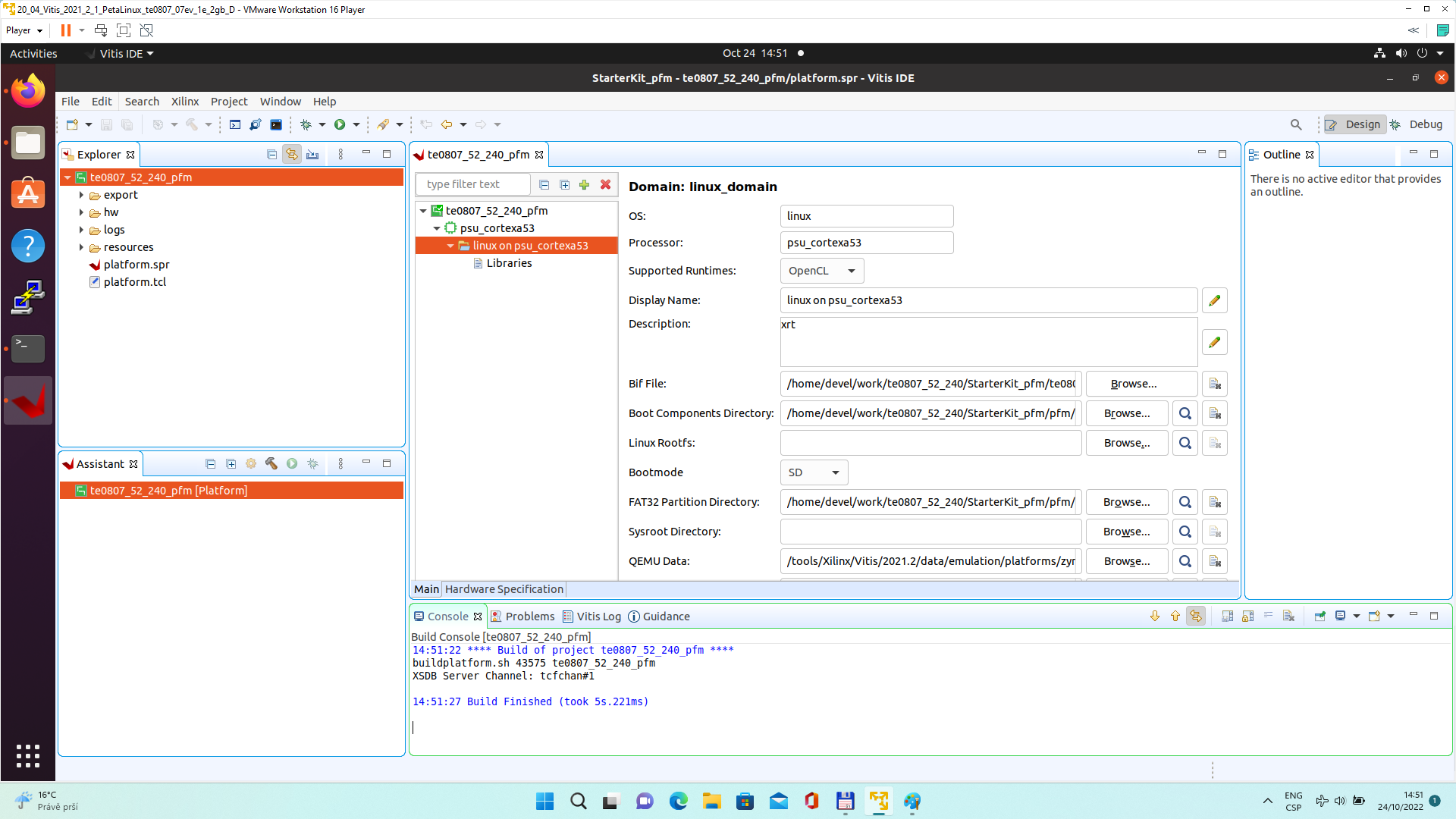 |
Vits extensible platform te0807_52_240_pfm has been created in the directory:
~/work/te0807_52_240/StarterKit_pfm/te0807_52_240_pfm/export/
te0807_52_240_pfm
Platform Usage
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Test 1: Read Platform Info
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
With Vitis environment setup, platforminfo tool can report XPFM platform information.
| Code Block | ||
|---|---|---|
| ||
platforminfo ~/work/te0807_52_240/StarterKit_pfm/te0807_52_240_pfm/export/te0807_52_240_pfm/te0807_52_240_pfm.xpfm |
| Code Block | ||||
|---|---|---|---|---|
| ||||
=====================
Basic Platform Information
==========================
Platform: te0807_52_240_pfm
File: /home/devel/work/te0807_52_240/StarterKit_pfm/te0807_52_240_pfm/export/te0807_52_240_pfm/te0807_52_240_pfm.xpfm
Description:
te0807_52_240_pfm
=====================================
Hardware Platform (Shell) Information
=====================================
Vendor: trenz
Board: zusys
Name: zusys
Version: 4.0
Generated Version: 2021.2.1
Hardware: 1
Software Emulation: 1
Hardware Emulation: 1
Hardware Emulation Platform: 0
FPGA Family: zynquplus
FPGA Device: xczu7ev
Board Vendor: trenz.biz
Board Name: trenz.biz:te0807_7ev_1e_tebf0808TEBF0808:4.0
Board Part: xczu7ev-fbvb900-1-e
=================
Clock Information
=================
Default Clock Index: 4
Clock Index: 1
Frequency: 100.000000
Clock Index: 2
Frequency: 200.000000
Clock Index: 3
Frequency: 400.000000
Clock Index: 4
Frequency: 240.000000
==================
Memory Information
==================
Bus SP Tag: HP0
Bus SP Tag: HP1
Bus SP Tag: HP2
Bus SP Tag: HP3
Bus SP Tag: HPC0
Bus SP Tag: HPC1
=============================
Software Platform Information
=============================
Number of Runtimes: 1
Default System Configuration: te0807_52_240_pfm
System Configurations:
System Config Name: te0807_52_240_pfm
System Config Description: te0807_52_240_pfm
System Config Default Processor Group: linux_domain
System Config Default Boot Image: standard
System Config Is QEMU Supported: 1
System Config Processor Groups:
Processor Group Name: linux on psu_cortexa53
Processor Group CPU Type: cortex-a53
Processor Group OS Name: linux
System Config Boot Images:
Boot Image Name: standard
Boot Image Type:
Boot Image BIF: te0807_52_240_pfm/boot/linux.bif
Boot Image Data: te0807_52_240_pfm/linux_domain/image
Boot Image Boot Mode: sd
Boot Image RootFileSystem:
Boot Image Mount Path: /mnt
Boot Image Read Me: te0807_52_240_pfm/boot/generic.readme
Boot Image QEMU Args: te0807_52_240_pfm/qemu/pmu_args.txt:te0807_52_240_pfm/qemu/qemu_args.txt
Boot Image QEMU Boot:
Boot Image QEMU Dev Tree:
Supported Runtimes:
Runtime: OpenCL |
Test 2: Run Vector Addition Example
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Create new directory StarterKit_test_vadd vadd to test Vitis extendable flow example “vector addition”
~/work/te0807_52_240/StarterKit_test_vadd
Current directory structure:
~/work/te0807_52_240/StarterKit
~/work/te0807_52_240/StarterKit_pfm
~/work/te0807_52_240/StarterKit_test_vadd
Change working directory:
| Code Block | ||
|---|---|---|
| ||
$cd ~/work/te0807_52_240/StarterKit_test_vadd |
In Ubuntu terminal, start Vitis by:
| Code Block | ||
|---|---|---|
| ||
$ vitis & |
In Vitis IDE Launcher, select your working directory
~/work/te0807_52_240/StarterKit_test_vadd
Click on Launch to launch start Vitis.
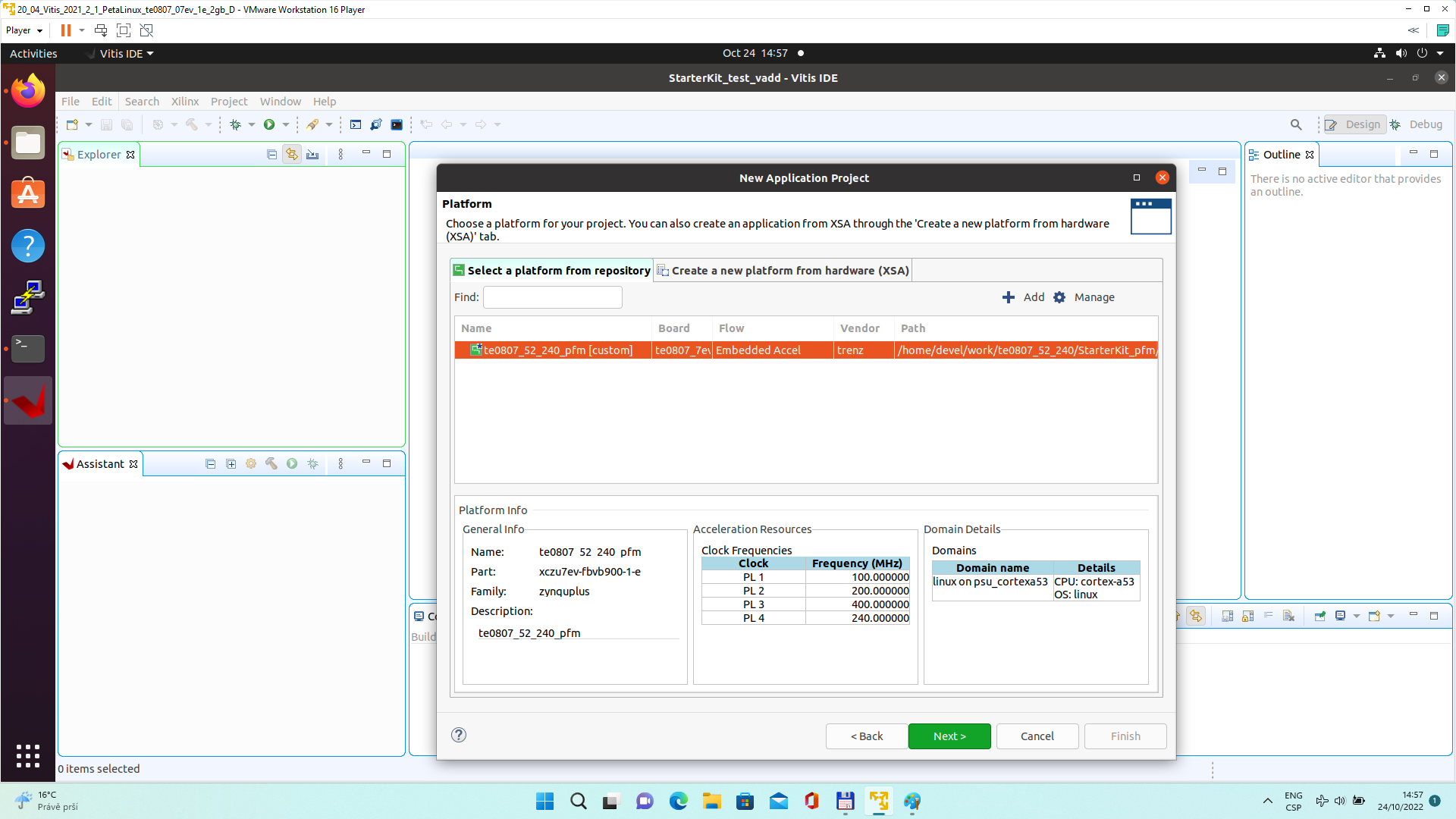
Select File -> New -> Application project. Click Next.
Skip welcome page if shown.
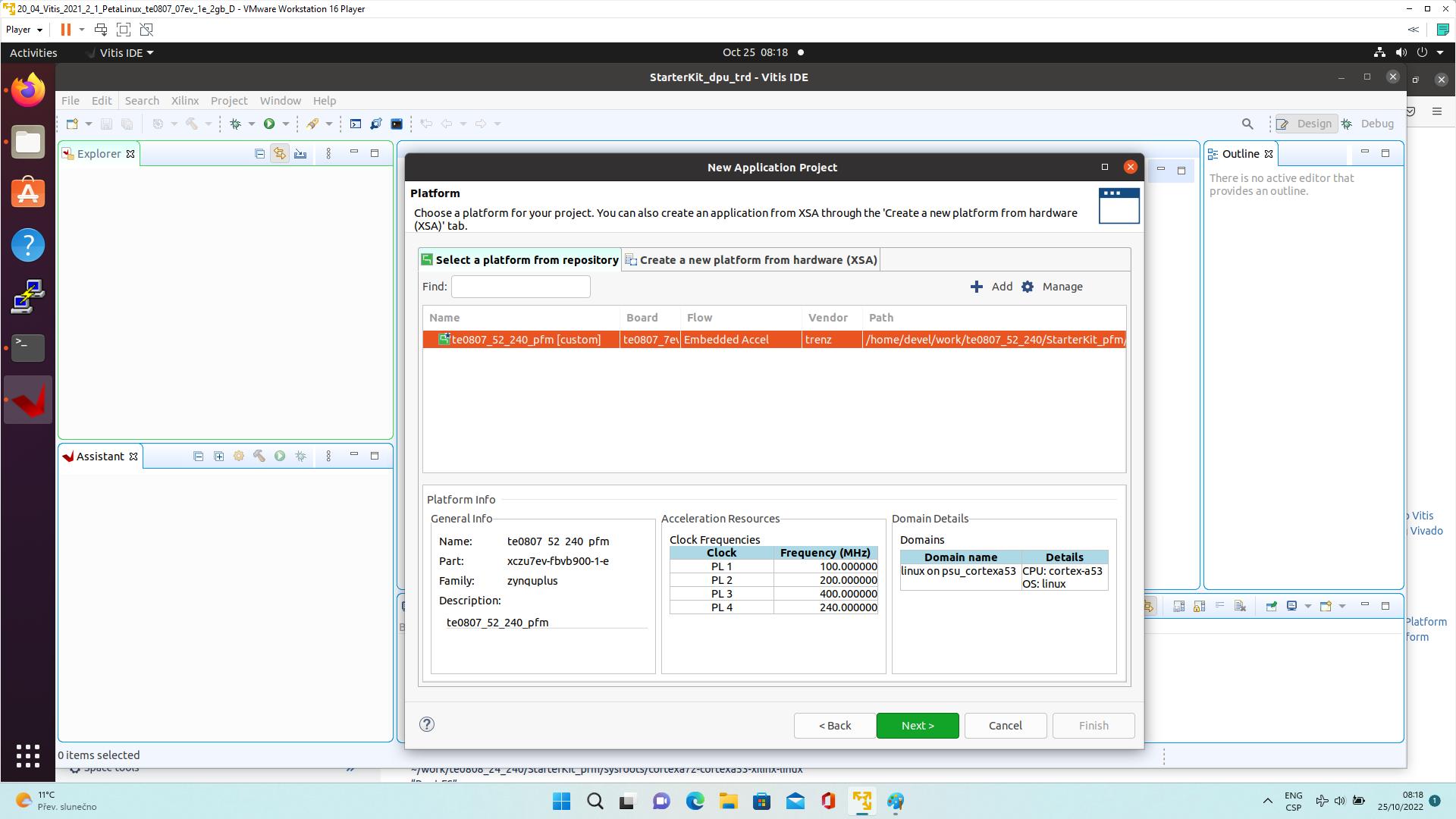
Click on “+ Add” Add” icon and select the custom extensible platform te0807_52_240_pfm[custom] in the directory:
~/work/te0807_52_240/StarterKit_pfm/te0807_52_240_pfm/export/
te0807_52_240_pfm
We can see available PL clocks and frequencies.
| Note |
|---|
| PL4 with 240 MHz clock is has been set as default in the platform creation process. |
| Scroll Title | ||
|---|---|---|
| ||
 |
Click Next.
In “Application Project Details” window type into Application project name: test_vadd
Click next Next.
In “Domain window” type (or select by browse):
“Sysroot path”:
~/work/te0807_52_240/StarterKit_pfm/sysroots/cortexa72-cortexa53-xilinx-linux
“Root FS”:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux/rootfs.ext4
“Kernel Image”:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux/Image
Click Next.
In “Templates window”, if not done before, update “Vitis IDE Examples” and “Vitis IDE Libraries”.
Select Host Examples
In “Find”, type: “vector add” to search for the “Vector Addition” example.
Select: “Vector Addition”
Click Finish
New project template is created.
In test_vadd window menu “Active build configuration” switch from “SW Emulation” to “Hardware”.
In “Explorer” section of Vitis IDE, click on: test_vadd_system[te0807_52_240_pfm] to select it.
Right Click on: test test_vadd_system[te0807_52_240_pfm] and select in the opened sub-menu:
Build project
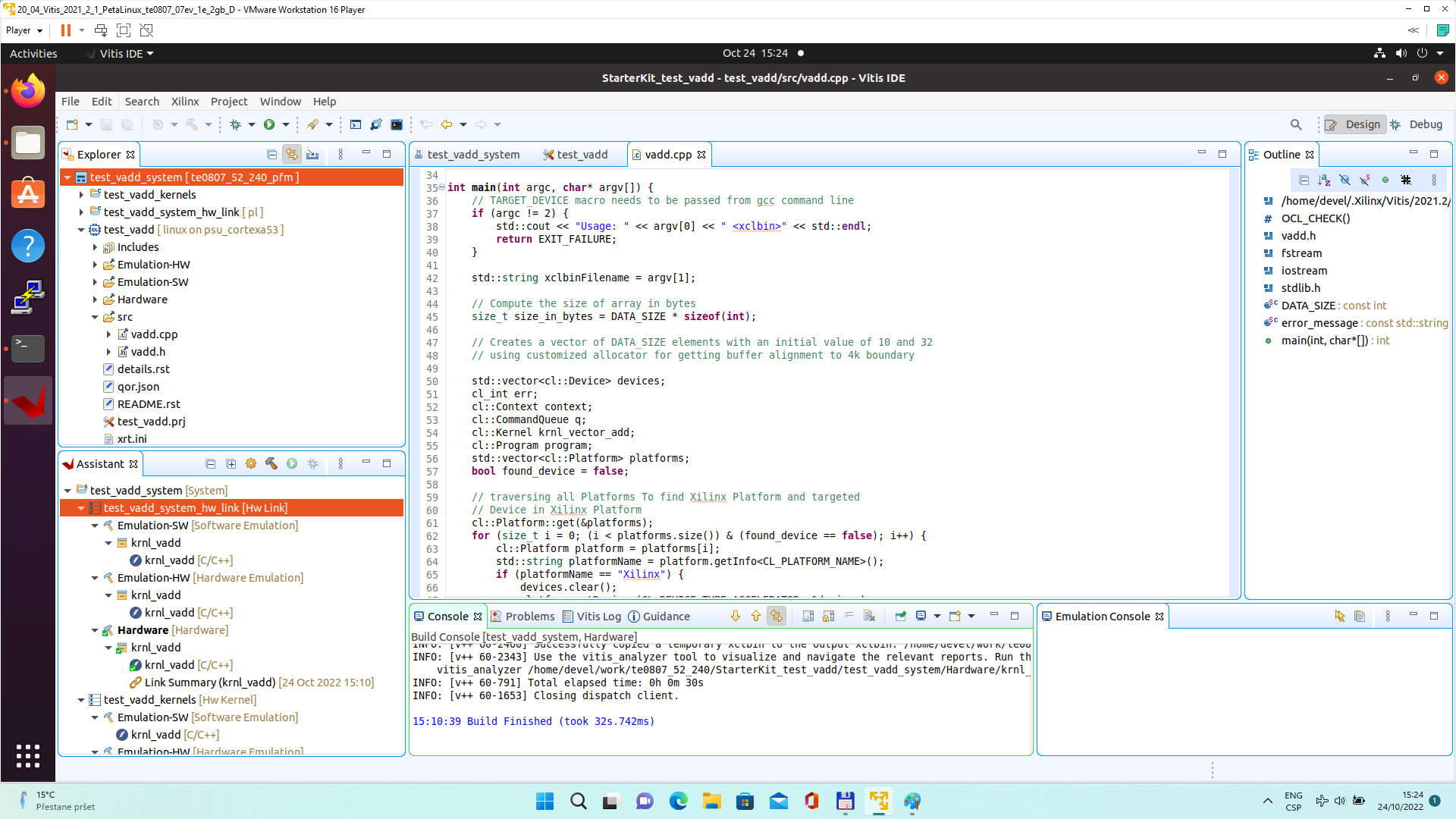
Vitis will compile:
In test_vadd_kernels subproject, compile the krnl_vadd from C++ SW to HDL HW IP source code
In test_vadd_system_hw_link subproject, compile the krnl_vadd HDL together with te0807_52_240_pfm into new, extended HW design with new accelerated (krnl_vadd) will run on the default 240 MHz clock. This step can take some time.
In test_vadd subproject, compile the vadd.cpp application example.
| Scroll Title | ||
|---|---|---|
| ||
 |
Run Compiled Example Application
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
The sd_card.img file is output of the compilation and packing by Vitis. It is located in directory:
~/work/te0807_52_240/StarterKit_test_vadd/test_vadd_system/Hardware/package/sd_card.img
Write the sd card image from the sd_card.img file to SD card.
| Note |
|---|
| In Windows Pro 10 (or Windows 11 Pro) PC, inst all program Win32DiskImager for this task. Win32 Disk Imager can write raw disk image to removable devices. https://win32diskimager.org/ |
Insert the SD card to the tebf0808 TEBF0808 carrier board.
Connect PC USB terminal (115200 bps) card to the tebf0808 TEBF0808 carrier board.
Connect USB Keyboard and USB Mouse to the tebf0808 TEBF0808 carrier board.
Connect Ethernet cable to the tebf0808 TEBF0808 carrier board.
Power on the tebf0808 TEBF0808 carrier board.
In PC, find the assigned serial line COM port number for the USB terminal. In case of Win 10 use device manager.
In PC, open serial line terminal with the assigned COM port number. Speed 115200 bps.
Connect Monitor to the Display Port connector of the tebf0808 TEBF0808 carrier board.
On tebf0808TEBF0808, press button S1 to start the system (press the button for cca. 1 sec. ).
(FMC fan starts to rotate, USB terminal starts to display booting information)
Display Port Monitor indicates text “Please wait: Booting…” (white text, black background).
X11 screen opens on Display port.
Mouse and keyboard connected to the tebf0808 TEBF0808 carrier board can be used.
Click on “Terminal” icon (A Unicode capable rxvt)
Terminal opens as an X11 graphic window.
In terminal, use keyboard connected to the tebf0808 TEBF0808 carrier board and type:
| Code Block | ||
|---|---|---|
| ||
sh-5.0# cd /media/sd-mmcblk1p1/ sh-5.0# ./test_vadd krnl_vadd.xclbin |
The application test_vadd should run with this output:
| Code Block | ||
|---|---|---|
| ||
sh-5.0# cd /media/sd-mmcblk1p1/ sh-5.0# ./test_vadd krnl_vadd.xclbin INFO: Reading krnl_vadd.xclbin Loading: 'krnl_vadd.xclbin' Trying to program device[0]: edge Device[0]: program successful! TEST PASSED sh-5.0# |
The Vitis application has been compiled to HW and evaluated on custom system
with extensible custom te0807_52_240_pfm platform.
Close the rxvt terminal emulator by click ”x” icon (in the upper right corner) or by typing:
| Code Block | ||
|---|---|---|
| ||
# exit |
In X11, click ”Shutdown” icon to close down safely.
System is halted. Messages relate to halt of the system can be seen on the USB terminal).
The Display Port output is switched off.
The tebf0808 TEBF0808 carrier board can be powered off by pressing on the S1 switch (cca. 1 sec long).
The FMC fan stops.
The SD card can be safely removed from the tebf0808 TEBF0808 carrier board, now.
The tebf0808 TEBF0808 carrier board can be disconnected from power.
Test 3: Vitis-AI Demo
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
This test implements simple AI demo to verify DPU integration to our custom extensible platform. This tutorial follows Xilix Vitis Tutorial for zcu104 with necessary fixes and customizations required for our case.
Create and Build Vitis Design
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Create new directory StarterKit_dpu_trd to test Vitis extendable flow example “dpu trd”
~/work/te0807_52_240/StarterKit_dpu_trd
Current directory structure:
~/work/te0807_52_240/StarterKit
~/work/te0807_52_240/StarterKit_pfm
~/work/te0807_52_240/StarterKit_test_vadd
~/work/te0807_52_240/StarterKit_dpu_trd
Change working directory:
| Code Block | ||
|---|---|---|
| ||
$cd ~/work/te0807_52_240/StarterKit_dpu_trd |
In Ubuntu terminal, start Vitis by:
| Code Block | ||
|---|---|---|
| ||
$ vitis & |
In Vitis IDE Launcher, select your working directory
~/work/te0807_52_240/StarterKit_dpu_trd
Click on Launch to launch Vitis.
Add Vitis-AI Repository to Vitis
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Open menu Window → Preferences
Go to Library Repository tab
Add Vitis-AI by clicking Add button and fill the form as shown below, use absolute path to your home folder in field "Location":
| Scroll Title | ||
|---|---|---|
| ||
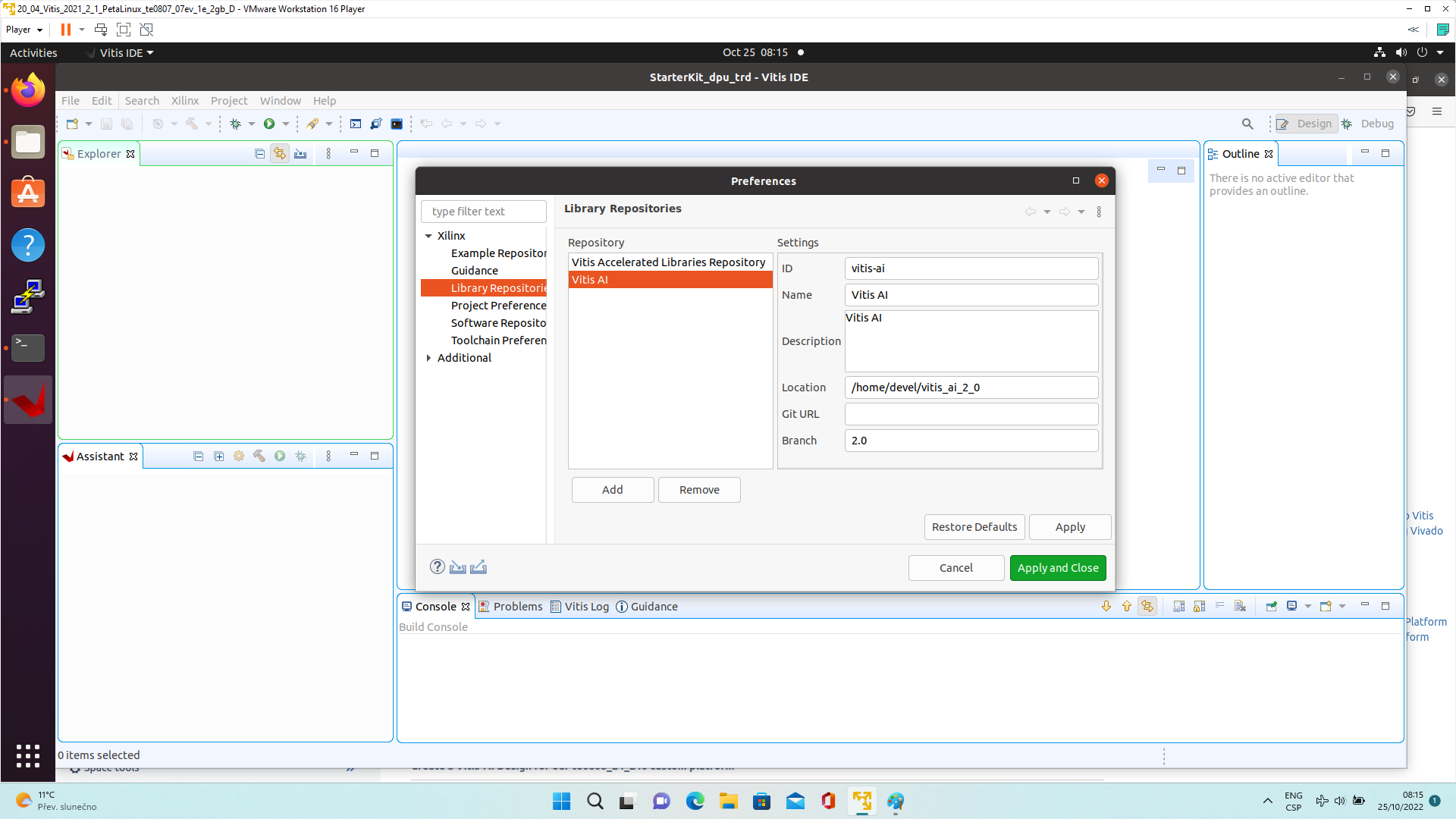 |
Click Apply and Close.
| Info |
|---|
| Field "Location" says that the Vitis-AI repository from github has been cloned /exported into ~/vitis_ai_2_0 folder, allready in the stage of Petalinux configuration. It is the same Vitis-AI 2.0 package downloaded from the branch 2.0. Use the absolute path to your home directory. It depends on the user name. The user name in the figure is "devel". Replace it by your user name. |
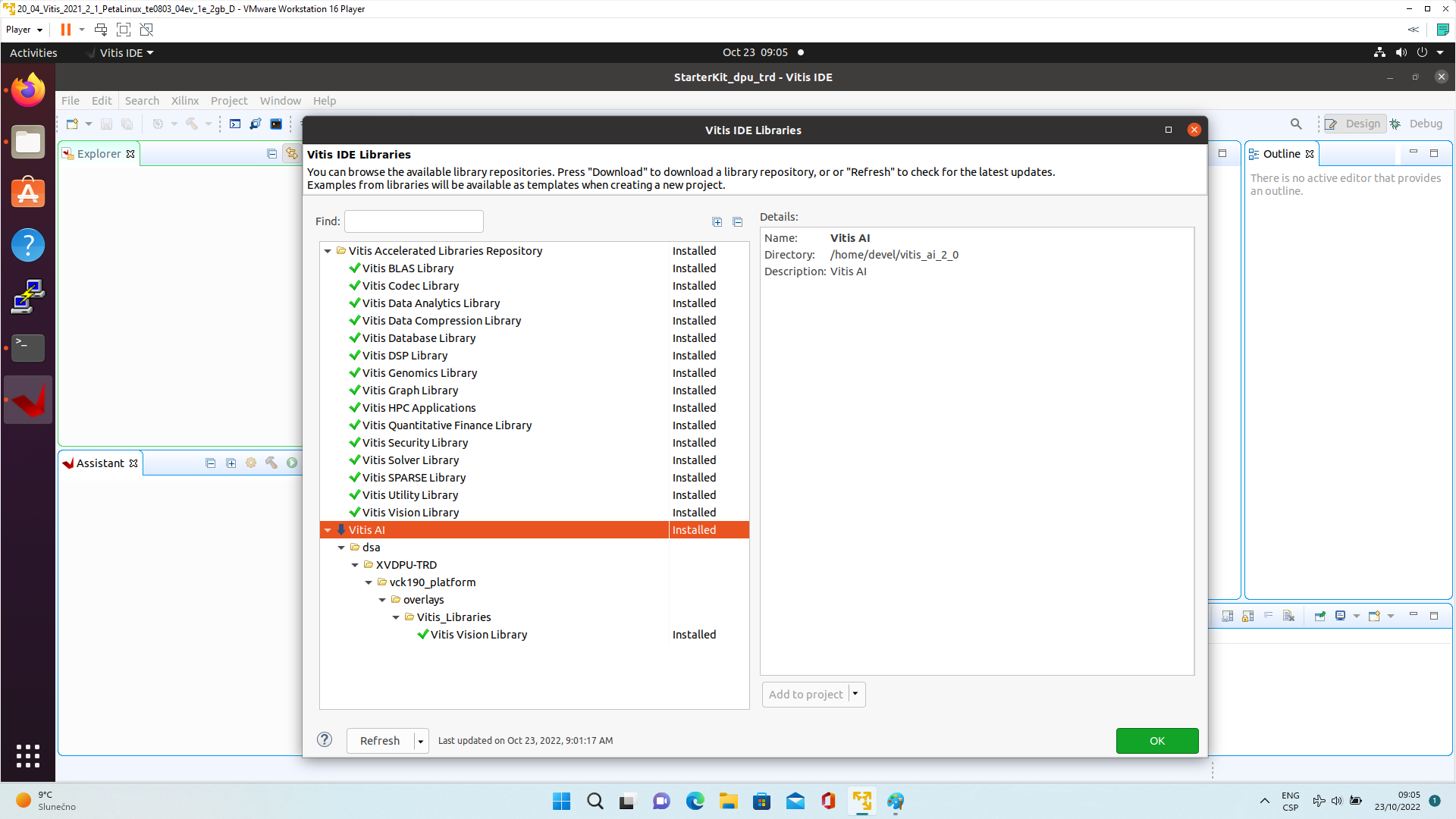
Correctly added library appears in Libraries:
Open menu Xilinx → Libraries...
You can find there just added Vitis-AI library marked as "Installed" .as shown in image:
| Scroll Title | ||
|---|---|---|
| ||
|
Create a Vitis-AI Design for our te0807_52_240 custom platform
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Select File -> New -> Application project. Click Next.
Skip welcome page if shown.
Click on “+ Add” Add” icon and select the custom extensible platform te0807_52_240_pfm[custom] in the directory:
~/work/te0807_52_240/StarterKit_pfm/te0807_52_240_pfm/export/
te0807_52_240_pfm
We can see available PL clocks and frequencies.
| Note |
|---|
| PL4 with 240 MHz clock is has been set as default in the platform creation process. |
| Scroll Title | ||
|---|---|---|
| ||
 |
Click Next.
In “Application Project Details” window type into Application project name: dpu_trd
Click next Next.
In “Domain window” type (or select by browse):
“Sysroot path”:
~/work/te0807_52_240/StarterKit_pfm/sysroots/cortexa72-cortexa53-xilinx-linux
“Root FS”:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux/rootfs.ext4
“Kernel Image”:
~/work/te0807_52_240/StarterKit/os/petalinux/images/linux/Image
Click Next.
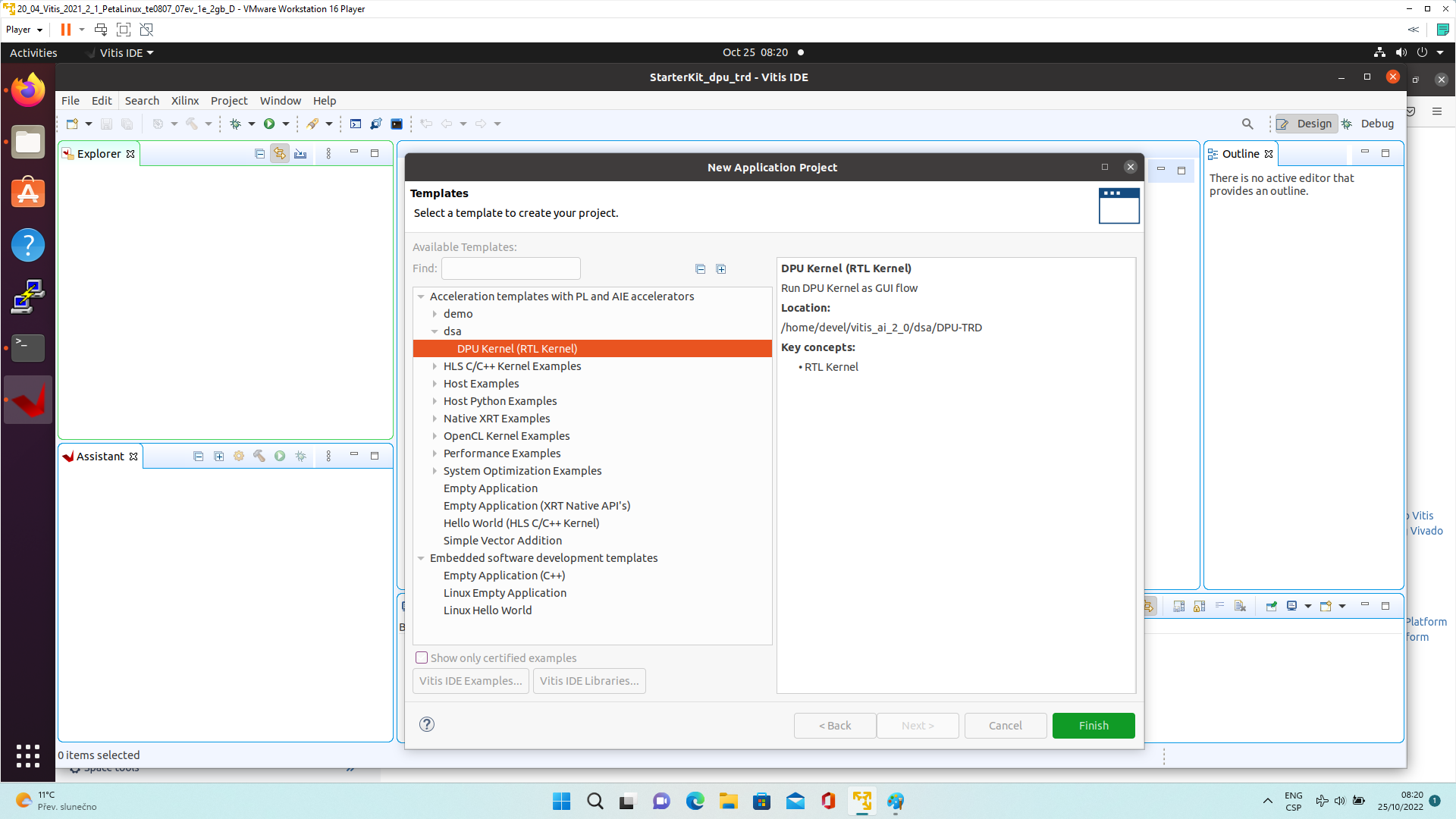
In “Templates window”, if not done before, update “Vitis IDE Examples” and “Vitis IDE Libraries”.
In “Find”, type: “dpu” “dpu” to search for the “DPU “DPU Kernel (RTL Kernel)” example.
Select: “DPU “DPU Kernel (RTL Kernel)”
| Scroll Title | ||
|---|---|---|
| ||
 |
Click Finish
New project template is created.
In dpu_trd window menu “Active build configuration” switch from “SW Emulation” to “Hardware”.
| Info |
|---|
| File dpu_conf.vh located at dpu_trd_kernels/src/prj/Vitis directory contains DPU configuration. |
Open file dpu_conf.vh and change in line 37:
`define URAM_DISABLE
to
`define URAM_ENABLE
and save modified file.
This modification is necessary for succsessfull implementation of the DPU on the zcu04-ev module with internal memories implemented in URAMs.
Go to dpu_trd_system_hw_link and double click on dpu_trd_system_hw_link.prj.
Remove sfm_xrt_top kernel from binary container by right clicking on it and choosing remove.
Reduce number of DPU kernels to one.
Configure connection of DPU kernels
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
On the same tab right click on dpu and choose Edit V++ Options
| Scroll Title | ||
|---|---|---|
| ||
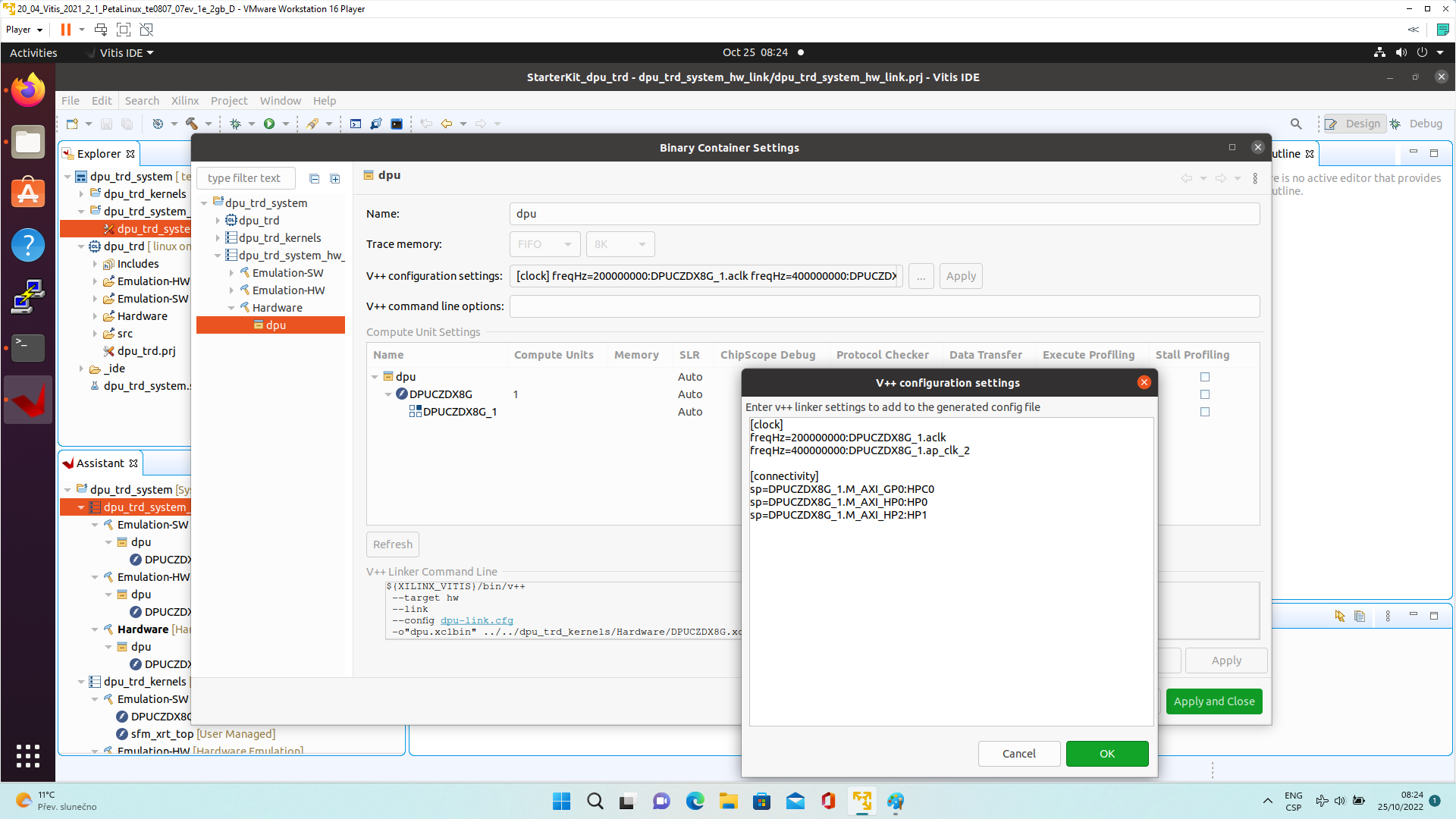 |
Click "..." button on the line of V++ Configuration Settings and modify configuration as follows:
| Code Block | ||
|---|---|---|
| ||
[clock] freqHz=200000000:DPUCZDX8G_1.aclk freqHz=400000000:DPUCZDX8G_1.ap_clk_2 [connectivity] sp=DPUCZDX8G_1.M_AXI_GP0:HPC0 sp=DPUCZDX8G_1.M_AXI_HP0:HP0 sp=DPUCZDX8G_1.M_AXI_HP2:HP1 |
Update packaging to add dependencies into SD Card
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Create a new folder img in your project in dpu_trd/src/app
Download image from provided link and place it to newly created folder dpu_trd/src/app/img.
Double click dpu_trd_system.sprj
Click "..." button on Packaging options
Enter "--package.sd_dir=../../dpu_trd/src/app"
Click OK.
Build DPU_TRD application
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
In “Explorer” section of Vitis IDE, click on: dpu_trd_system[te0807_52_240_pfm] to select it.
Right Click on: dpu_trd_system[te0807_52_240_pfm] and select in the opened sub-menu:
Build project
Run DPU_TRD on Board
| Scroll Ignore | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Write sd_card.img to SD card using SD card reader.
The sd_card.img file is output of the compilation and packing by Vitis. It is located in directory:
~/work/te0807_52_240/StarterKit_dpu_trd/dpu_trd_system/Hardware/package/sd_card.img
| Note |
|---|
| In Windows Pro 10 (or Windows 11 Pro) PC, inst all program Win32DiskImager for this task. Win32 Disk Imager can write raw disk image to removable devices. https://win32diskimager.org/ |
Boot the board and open terminal on the board either by connecting serial console connection, or by opening ethernet connection to ssh server on the board, or by opening terminal directly using window manager on board. Continue using the embedded board terminal.
| Info |
|---|
Detailed guide how to run embedded board and connect to it can be found in Run Compiled Example Application for Vector Addition. |
Check ext4 partition size by:
| Code Block | ||
|---|---|---|
| ||
root@petalinux:~# cd / root@petalinux:~# df . Filesystem 1K-blocks Used Available Use% Mounted on /dev/root 564048 398340 122364 77% / |
Resize partition
| Code Block | ||
|---|---|---|
| ||
root@petalinux:~# resize-part /dev/mmcblk1p2 /dev/mmcblk1p2 Warning: Partition /dev/mmcblk1p2 is being used. Are you sure you want to continue? parted: invalid token: 100% Yes/No? yes End? [2147MB]? 100% Information: You may need to update /etc/fstab. resize2fs 1.45.3 (14-Jul-2019) Filesystem at /dev/mmcblk1p2 is mounted on /media/sd-mmcblk1p2; o[ 72.751329] EXT4-fs (mmcblk1p2): resizing filesystem from 154804 to 1695488 blocks n-line resizing required old_desc_blocks = 1, new_desc_blocks = 1 [ 75.325525] EXT4-fs (mmcblk1p2): resized filesystem to 1695488 The filesystem on /dev/mmcblk1p2 is now 1695488 (4k) blocks long. |
Check ext4 partition size again, you should see:
| Code Block | ||
|---|---|---|
| ||
root@petalinux:~# df . -h Filesystem Size Used Available Use% Mounted on /dev/root 6.1G 390.8M 5.4G 7% / |
| Note |
|---|
| The available size would be different according to your SD card size. |
Copy dependencies to home folder:
| Code Block | ||
|---|---|---|
| ||
# Libraries root@petalinux:~# cp -r /mnt/sd-mmcblk1p1/app/samples/ ~ # Model root@petalinux:~# cp /mnt/sd-mmcblk1p1/app/model/resnet50.xmodel ~ # Host app root@petalinux:~# cp /mnt/sd-mmcblk1p1/dpu_trd ~ # Images to test root@petalinux:~# cp /mnt/sd-mmcblk1p1/app/img/*.JPEG ~ |
Run the application from /home/root folder and you can observe that "bell pepper" receives highest score.
| Code Block | ||
|---|---|---|
| ||
root@petalinux:~# env XLNX_VART_FIRMWARE=/mnt/sd-mmcblk1p1/dpu.xclbin ./dpu_trd bellpeppe-994958.JPEG score[945] = 0.992235 text: bell pepper, score[941] = 0.00315807 text: acorn squash, score[943] = 0.00191546 text: cucumber, cuke, score[939] = 0.000904801 text: zucchini, courgette, score[949] = 0.00054879 text: strawberry, |
| Page properties | ||||
|---|---|---|---|---|
| ||||
decide free what's the best why to describe changes from standard reference design to get Vitis AI design. → Maybe add TCL code blox which automatically change the standard design? In case you has any question, let me know. |
| Scroll pdf ignore | ||||||
|---|---|---|---|---|---|---|
|
Overview
Content Tools