Page History
...
| Scroll pdf ignore | |
|---|---|
|
Introduction
| Scroll Only (inline) |
|---|
Refer to https://wiki.trenz-electronic.de/display/PD/EDDP+User+Manual for online version of this manual and additional technical documentation of the product.
|
The Electronic Drive Development Platform (EDDP) provides all necessary software and hardware components for development and evaluation of motor control applications. While these components (both software and hardware) can also be used separately, this manual describes EDDP usage with default reference hardware platform (EDDP Kit) only.
...
| Term | Description | ||
|---|---|---|---|
| Adapter Board | Adapts the Reference Motor to the EDPS Board. | ||
| Control Board | A Digilent Arty Z7 with the firmware containing the FOC algorithm necessary to control theAn electronic board for controlling the EDPS Board, a Digilent board Arty Z7. | ||
| EDDP | Electronic Drive Development Platform. | ||
| EDDP Kit | A kit consisting of the EDPS Board, the Reference Motor, the Adapter board and. | ||
| EDPS Board | An Electric Drive Power Stage | .EDPS Board | A Board, a Trenz Electronic GmbH board TEC0053 used as EDPS. |
| Host PC | A computer capable of running a web browser in order to run the Web UI. | ||
| Reference Motor | The motor included in the EDDP Kit. This motor is of brushless type and is already mated with an encoder. | ||
| Web UI | A user interface in the form of a web page permitting operating the EDDP. |
...
The Reference Motor with Encoder is connected to the EDPS Board using the Adapter Board TEC0060(see Figure 1). In the EDDP Kit the Reference Motor is pre-assembled:.
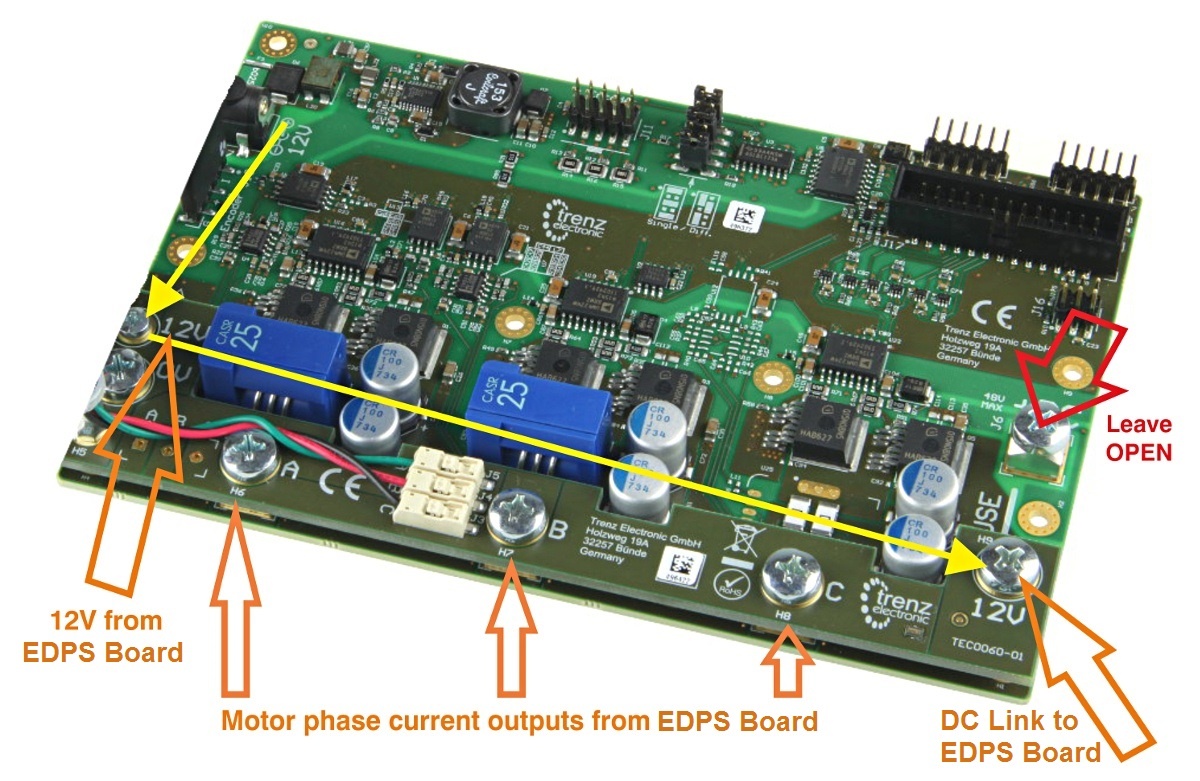
Figure 1: Top view of the EDPS Board with the Adapter Board mounted.
The Adapter Board is mounted to the EDPS Board using 5 x M6 screws (Labels 0V, A, B, C, 12V on Adapter Board) and with M3 screws and spacer - marked 12V at the left. This Adapter board Board "forwards" (the yellow arrow) the EDPS Board pre-driver supply (12V) to the DC Link main terminal on the EDPS board, so that separate DC Link power supply is not needed allowing easy evaluation of the complete system.
...
Note terminal marked+DC must be left open when using the Adapter boardBoard!
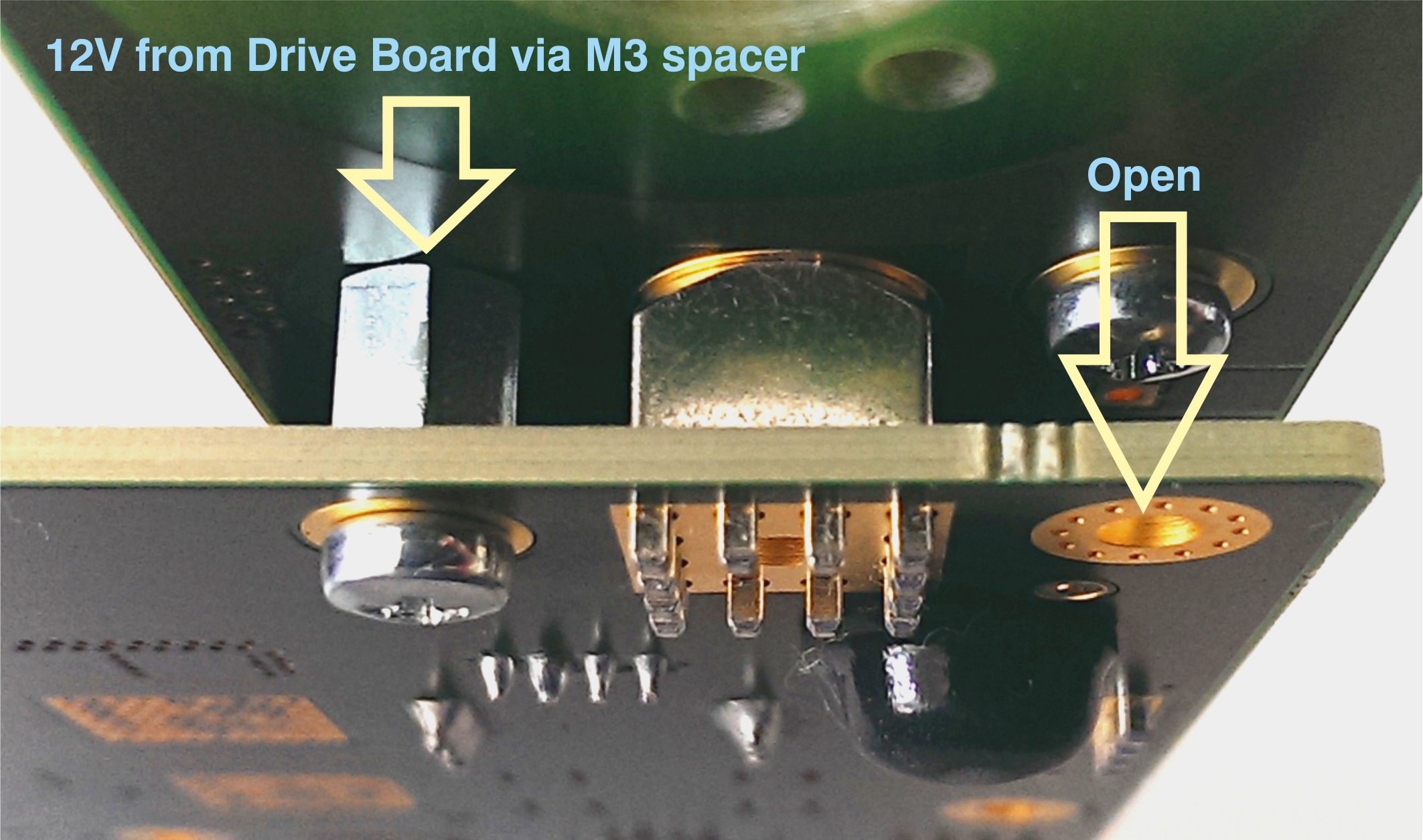
Figure 2: M3 spacer and two M3 screws connect 12V from the EDPS board to the Adapter boardBoard.
Motor Connection
In the EDDP Kit the Reference Motor stator wires for all three phases are already connected to the Adapter Board. Instructions for manual assembly below:
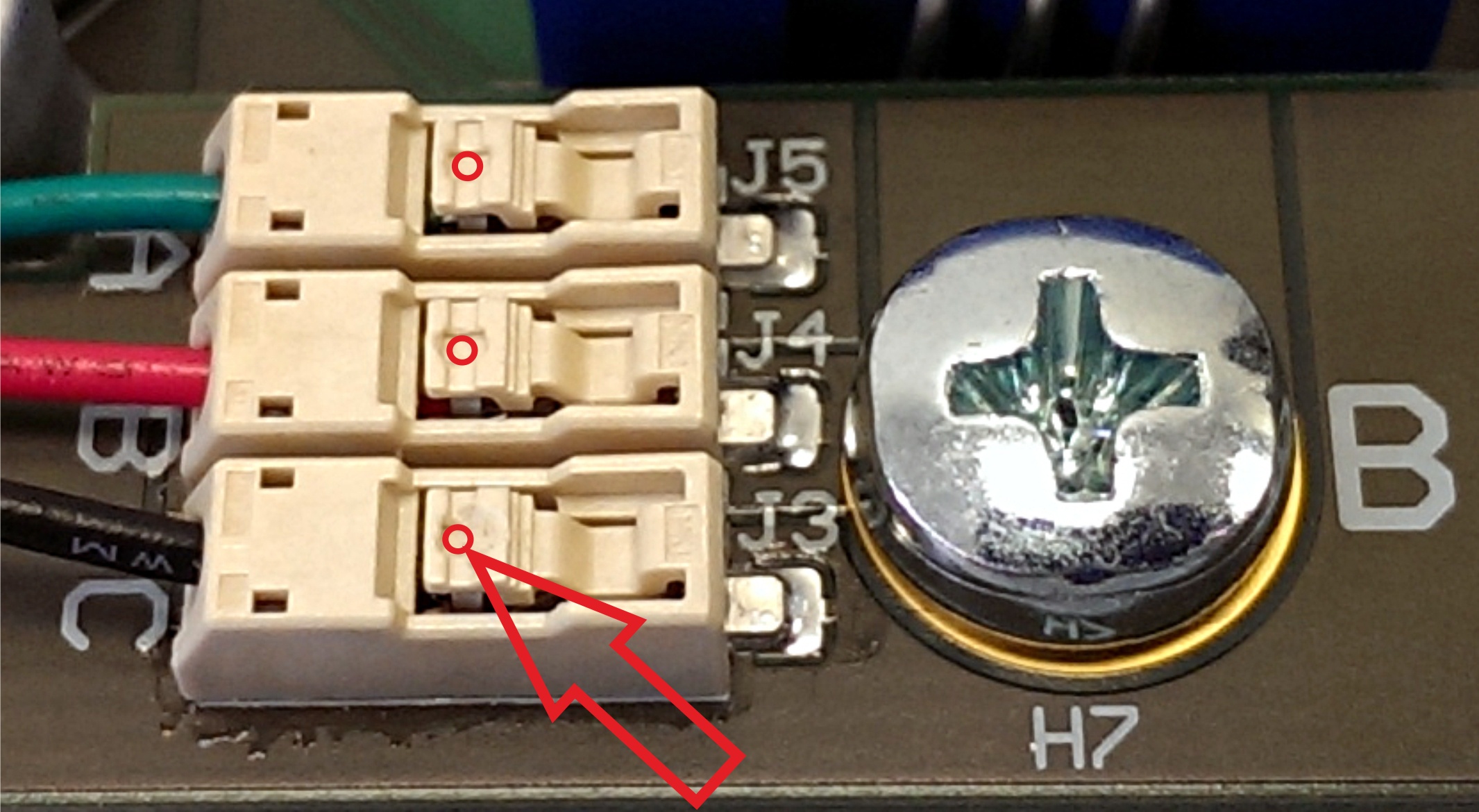
Figure 3: Red dots and arrow mark the place where wire terminal can be released for insertion or removal.
...
One 6-pin Pmod cable is included with the EDDP Kit. It is already assembled between the encoder and Drive the EDPS Board. Instructions for manual assembly are below:
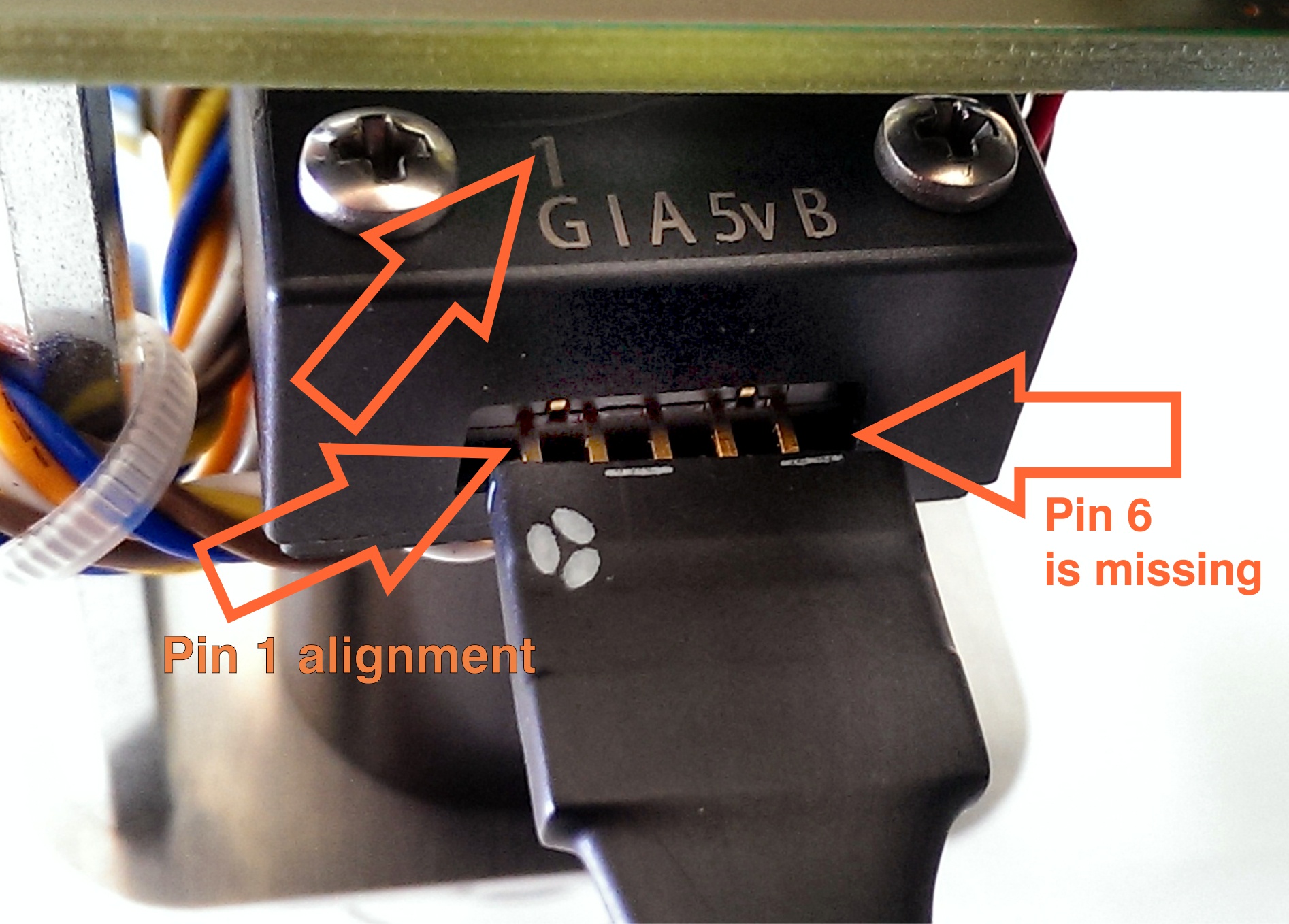
Figure 4: Pmod cable alignment to Encoder connectorthe Encoder connector.
Notice that there are 5 pins in the Encoder header while the PMoD female connector has 6 terminals. Red Arrow marks the "empty" terminal at the PMoD Cable.
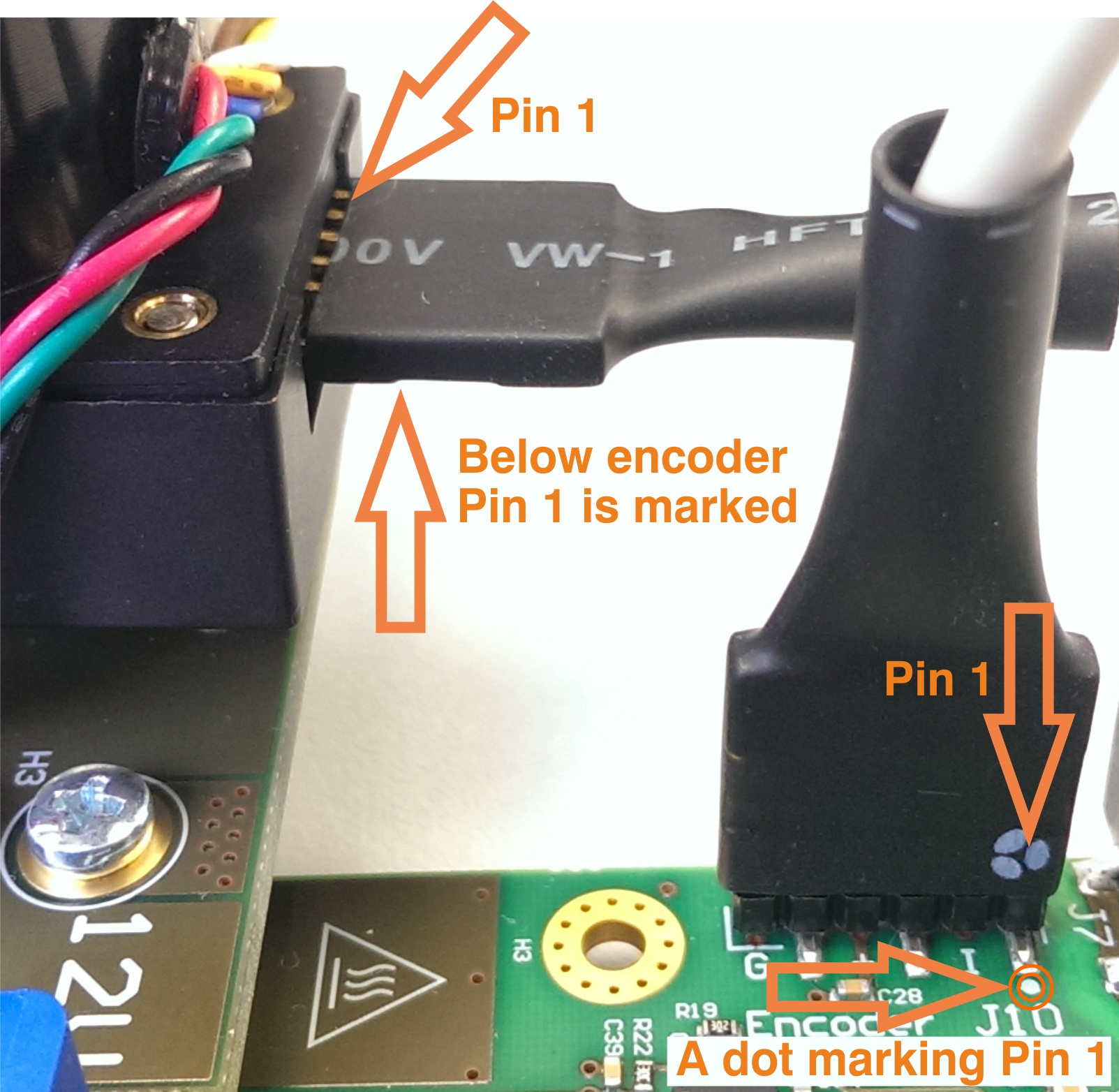
Figure 5: Pmod cable installation.
Pin 1 markings are indicated with the arrows, on the Drive EDPS Board a white dot marks 6-pin Pmod header pin 1. This pin should be aligned to the Encoder Pin marked "G" and "1" visible when looking from the bottom up. Please note that Encoder header has 5 terminals while the driver board and Pmod cable have 6 terminals.
Network configuration on the Host PC (Optional)
An overview of network configuration and some methods for network troubleshooting are given.
It is assumed that the operating system on the Host PC is running a Microsoft Windows 7 or newer operating system. For other operating systems, the basic network principles are the same, but the means of configuration are different; consult the corresponding user guides.
...
During normal operation, the number of bytes sent ja received sent and received should increase when there is network traffic - , for example, when pinging the Control Board, when operating the Web UI, when pinging, etc.
...
where IP is the IP address of the Control Board. The result should be similar to the one on the following figure (Figure 8):
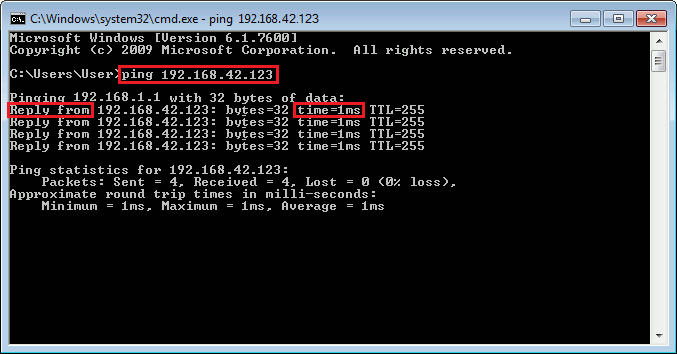
Figure 8: Successful check of network connectivity to the Control Board. The command entered by the user is highlighted, as are the important keywords that should be present in the output of the command "ping".
Verifying network adapter settings
In the network connection status dialog (Figure 7), click "Details". A Network Connection Details dialog Local Area Connection Status dialog,
Note: After a recent change of network settings, it can happen that the ping is not successful because the changes haven't propagated to the other participiants on the network yet. It can be sometimes remedied by running the command "ping" on the other computer, in this case, on the Control Board, pinging the IP address of the Host PC.
Verifying network adapter settings
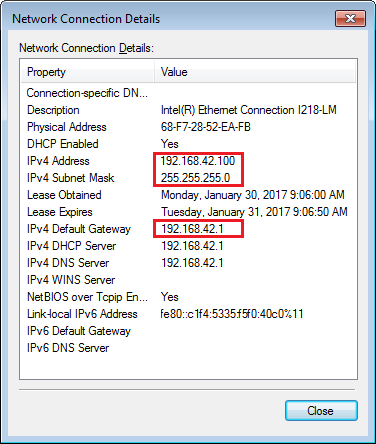
In the network connection status dialog (Figure 7), click "Details". A Network Connection Details dialog appears:
Figure 8: A Network Connection Details dialog, Figure 8: A Network Connection Details dialogue, with the important IP settings highlighted.
...
The network settings should be such that the Control Board is reachable from the Host PC. In the case when they are in the same network segment , e.g. when the gateway is not involved, the (gateway is not involved), the following conditions should hold:
- The subnet mask should be the same for the Control Board and the Host PC.
- The IP addresses for the Control Board and Host PC must be different.
- The subnet mask divides the IP address into two parts according to the the bits set in the binary notation (255 in decimal = 11111111 in binary):
- The network address, which corresponds to the the bits set in the subnet mask. This should be the same for the Control Board and the Host PC.
- The host address, which corresponds to the bits not set in the subnet mask. This should be different for the Control Board and the Host PC. Additional constraint: it cannot be neither null and it cannot be nor the maximum value either.
On the example of settings shown on Figure 8 and the default configuration in the default firmware, the conditions are fulfilled as follows:
- The subnet mask, 255.255.255.0, is the same for both.
- The IP addresses, 192.168.42.100 for the Host PC and 192.168.42.123 for the Control Board, differ.
- The subnet mask checks out as follows:
- The network address, 192.168.42.0, is the same for the Host PC and the Control Board.
- The host addresses, 0.0.0.100 for the Host PC and 0.0.0.123 for the Control Board, are different. In addition, neither is 0 nor the maximum value, 255 in this case.
Alternative method of viewing network settings: Open command prompt (see Figure 8) and execute the following command:
ipconfigIt will list all network connections and their associated IP addresses.
Changing the IP settings of a network connection
...
Figure 10: A TCP/IPv4 Properties dialog.
The settings on this dialogue have dialog have to match the actual network settings.
...
Other cases are not considered here; consultation with network administration and/or appropriate handbooks is recommended.
| Page break |
|---|
EDDP System Components
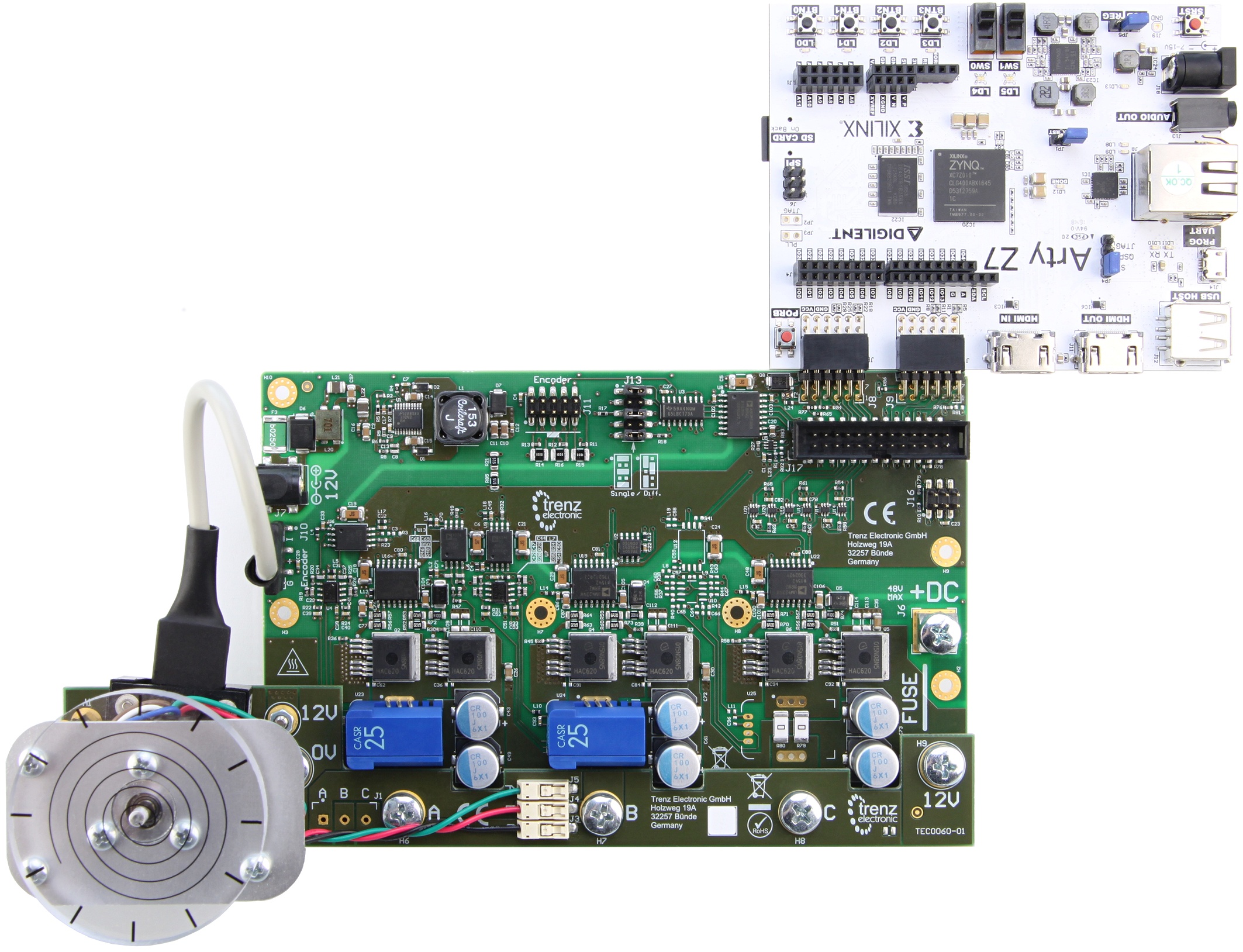
Figure 11: EDDP Kit assembly.
...
| Note |
|---|
The Motor is pre-mounted to the Driver board EDPS Board using the Adapter Board and accessories. |
...
The default Control Board is the Digilent ARTY-Z 7010, which is delivered as part of the EDDP Kit. This manual contains information relevent to the actual use of the ARTY-Z as a Control Board within the EDDP only; all technical data and user guides and manuals for the Controller Board are provided by the controller board manufacturer (Digilent Inc.). Use of the other Control boards with the EDPS Driver board EDPS Board is also outside the scope of this manual. Primary support for other control boards is currently provided by QDESYS.
...
The software delivered on the SD card configures the FPGA on the ARTY-Z board with the Field-Oriented Control algorithm and starts the web server to serve the Web UI.
To access observe the EDDP Web UI, enter IP address of the Controller Control Board to the web browser address field. The following page appears:
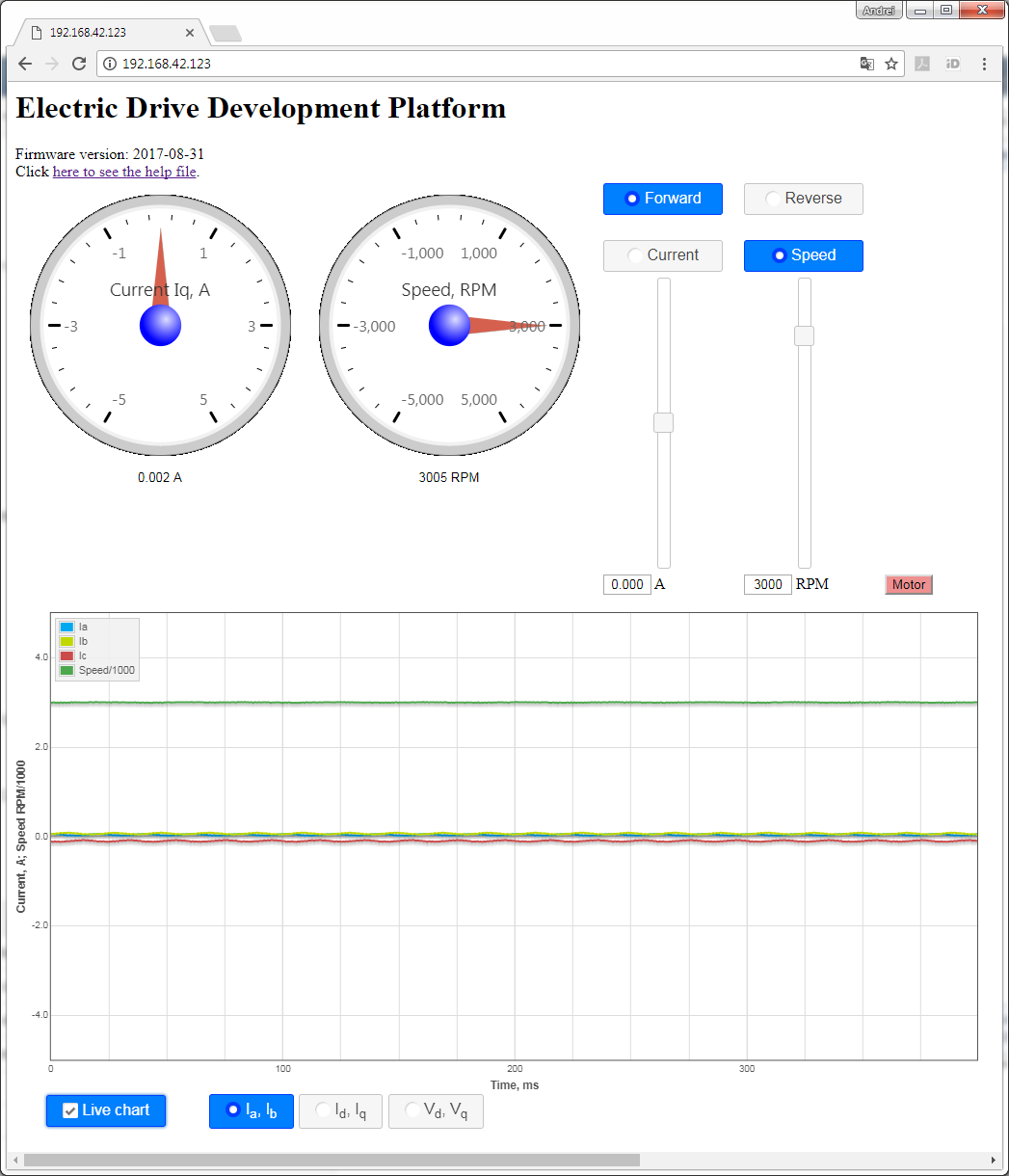
Figure 12: The Web UI.
To start the motor, click the button "Motor". The motor will make 3 rotations in order to make sure that encoder finds the initial position before starting in correct mode and the button will turn red. To stop the motor, click the button "Motor" again; the button will turn green.
The gauges show the stator current Iq and the motor speed in RPM.
To see the charts live, enable checkbox "Live charts". The following charts are available:
- Ia,Ib - shows stator currents Ia,Ib, the calculated current Ic and motor speed.
- Id,Iq - shows stator currents Id, Iq and motor speed.
- Vd,Vq - shows stator voltages Vd and Vq.
The radio buttons "Current" and "Speed" permit switching the control modes.
The sliders permit selecting the target speed and target current when in the appropriate mode. The direction radio buttons "Forward" and "Reverse" will be changed accordingly when the sign of the value is changed.
The radio buttons "Forward" and "Reverse" can be used to change the direction; the target slider will be changed accordingly.
Motor/Encoder
The Reference Motor is supplied in the EDDP Kit; see the chapter Reference Motor in the EDPS User Manual for details. Use of custom motors is outside the scope of this manual.
Functional description
, open the USB serial console at the baud rate of 115200 shortly after powering up the Control Board. There should be boot messages on the console and they should contain the IP address shown on the following Figure:
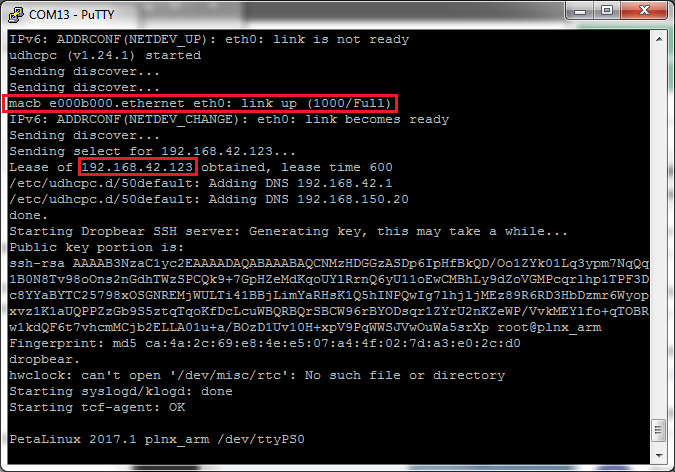
Figure 12: USB serial console log, with the network status message and IP address obtained via DHCP highlighted.
In the case the boot message was not seen for any reason, the network configuration can be seen by logging in as "root" with the password "root" and executing the command "ifconfig" as shown on the following figure:
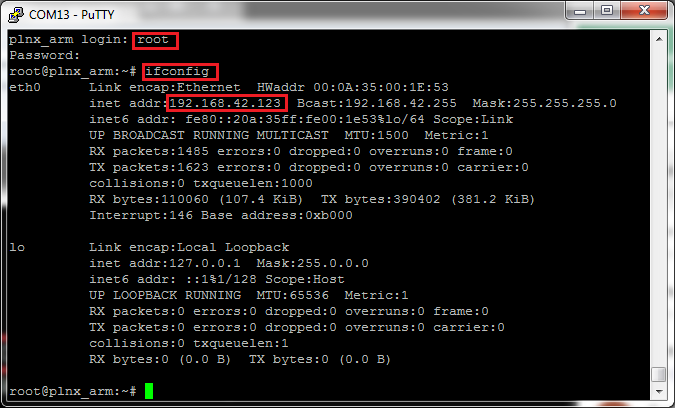
Figure 13: USB serial console, with login dialog, command "ifconfig" and the IP address highlighted.
To access the EDDP Web UI, enter IP address of the Control Board to the web browser address field. The following page appears:
Figure 14: The Web UI.
To start the motor, click the button "Motor". The motor will make 3 rotations in order to make sure that encoder finds the initial position before starting in correct mode and the button will turn red. To stop the motor, click the button "Motor" again; the button will turn green.
The gauges show the stator current Iq and the motor speed in RPM.
To see the charts live, enable checkbox "Live charts". The following charts are available:
- Ia,Ib - shows stator currents Ia,Ib, the calculated current Ic and motor speed.
- Id,Iq - shows stator currents Id, Iq and motor speed.
- Vd,Vq - shows stator voltages Vd and Vq.
The radio buttons "Current" and "Speed" permit switching the control modes.
The sliders permit selecting the target speed and target current when in the appropriate mode. The direction radio buttons "Forward" and "Reverse" will be changed accordingly when the sign of the value is changed.
The radio buttons "Forward" and "Reverse" can be used to change the direction; the target slider will be changed accordingly.
Motor/Encoder
The Reference Motor is supplied in the EDDP Kit; see the chapter Reference Motor in the EDPS User Manual for details. Use of custom motors is outside the scope of this manual.
Functional description
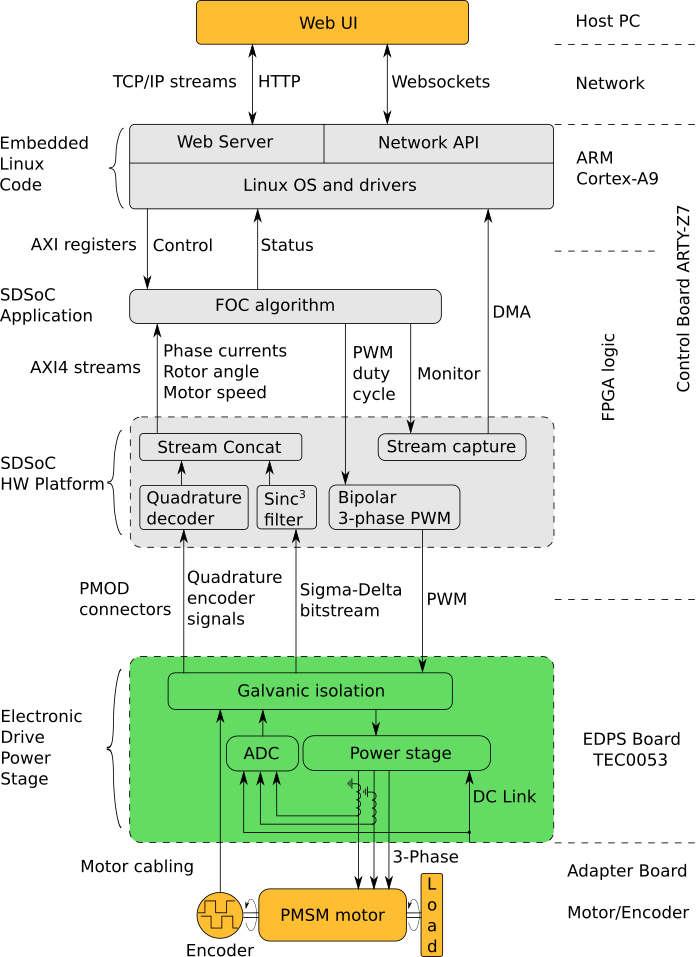
A 3-phase A 3-phase permanent-magnet synchronous motor with attached encoder and mechanical load is mounted to a EDPS Board by using an Adapter Board. The EDPS Board is connected to a Control Board ARTY-Z7 through PMOD connectors. A Host PC running a Web Browser connects to the Control Board through a Network.
...
- The Linux OS, that manages the hardware and provides execution environment for the programs to run in, which includes a TCP/IP network stack. The drivers included provide access to the control and status registers of the FOC algorithm and to the DMA buffer of the monitor data stream.
- The Network API, a server program, which provides an API built on top of Websockets protocol to control and monitor the FOC algorithm and to capture the monitor data stream.
- The Web Server, which is used to host the Web UI.
The Web UI running in a web browser on the Host PC enables use of the EDDP Kit from anywhere in the network.
Block Diagram
- the Web UI.
The Web UI running in a web browser on the Host PC enables use of the EDDP Kit from anywhere in the network.
Block Diagram
Figure 15: Block diagram of the EDDP.
| Page break |
|---|
FPGA resources utilization
An excerpt of the FPGA resource utilization by the FOC SDSoC Application Project is shown in the Table 2. The FPGA used on the Controller Board is Xilinx 7z010clg400-1.
The power draw of the design is about 220mW as measured by the increase of the power draw of the Control Board after configuring the FPGA.
| Type | Used | Available | Util% |
|---|---|---|---|
| Slice LUTs | 5758 | 17600 | 32.72 |
| Slice Registers | 7277 | 35200 | 20.67 |
| F7 Muxes | 33 | 8800 | 0.38 |
| RAMB36/FIFO | 21 | 60 | 35 |
| RAMB18 | 4 | 120 | 3.33 |
| DSP48E1 | 34 | 80 | 42.50 |
| BUFGCTRL | 4 | 32 | 12.50 |
| MMCME2_ADV | 1 | 2 | 50 |
Table 2: FPGA resources utilizationFigure 13: Block diagram of the EDDP.
List of additional documents
The additional documents, listed in the Table 23, can be downloaded from Trenz EDDP Web Hub:
...
| Title | Description |
|---|---|
| FOC SDSoC | Implementation of a Field-Oriented Control algorithm in C++ with Vivado SDSoC |
| SDSoC Hardware Platform ARTY-Z7 | A basis for building Vivado SDSoC applications running on an Arty-Z7 board connected to a TEC0053 board |
| AXI4-Stream AD7403 | An IP core for filtering the delta-sigma bitstream read from one or more ADC-s of type of AD7403 to an AXI4-Stream of samples |
| AXI4-Stream Encoder | An IP core for converting impulses from a relative index encoder with an index signal to an AXI4-Stream of position and speed data |
| AXI4-Stream PWM | An IP core for generating PWM signals according to the input AXI4-Stream |
| AXI4-Stream Concat | An IP core for concatenating AXI4-Streams |
| Web GUI | A Web UI to control and monitor an EDPS board Board over the Network API |
| Network API | A communication protocol, based on Websockets, to control an EDPS board |
| Embedded Linux Code | A server program interfacing to an EDPS board and implementing the Network API and the functions of a Web Server |
Table 23: List of additional documents.
...
Date | Revision | Contributors | Description | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Jan Kumann | General formatting changes and small corrections. | |||||||||
2017-08-14 | v.10 | Antti Lukats, Andrei Errapart | Initial document. |
Table 24: Document change history.
...
Overview
Content Tools