Overview
Refer to http://trenz.org/tem0007-info for the current online version of this manual and other available documentation.
Key Features
- Libero SoC v2023.1
- SoftConsole v2022.2-RISC-V-747
- PolarfireSoC MSS Configurator v2023.1
- HSS (Hardware System Service) v2023.02
- Microchip polarfire SoC BSP v2022.11
- FPExpress v2023.1
- Linux distribution BSP: "Yocto Kirkstone"
- UART
- ETH
- USB
- I2C
- QSPI flash
- LPDDR4 memory
Revision History
| Date | Libero SoC | Project Built | Authors | Description |
|---|---|---|---|---|
| 2024-04-17 | v2023.1 | TEM0007-test_board_noprebuilt-libero_23.1-20240417101518.zip
| Mohsen Chamanbaz |
|
| 2023-11-13 | v2023.1 | TEM0007-test_board_noprebuilt-libero_23.1-20231113135744.zip | Mohsen Chamanbaz |
|
| 2023-09-07 | v2023.1 | TEM0007-test_board_noprebuilt-libero_23.1-20230907135657.zip | Mohsen Chamanbaz |
|
Design Revision History
Release Notes and Know Issues
| Issues | Description | Workaround | To be fixed version |
|---|---|---|---|
| No known issues | --- | --- | --- |
Known Issues
Requirements
Software
| Software | Version | Note |
|---|---|---|
| Libero SoC | v2023.1 | needed for generating / viewing / modifying the hardware design |
| FPExpress | v2023.1 | needed. Included within Libero SoC installation or as a standalone application . |
| SoftConsole | v2022.2 | needed for generating / viewing / modifying the software design |
| PolarfireSoC MSS Configurator | v2023.1 | needed for configuration of MSS |
| Linux distribution "Yocto" | Kirkstone | needed |
Software
Additional software requirement
| Requirement | Version | Note |
|---|---|---|
| Hart Software Services | v2023.02 | needed |
| Microchip PolarFire SoC Yocto BSP (meta-polarfire-soc-yocto-bsp) | v2022.11 | needed |
Additional Software Requirement
Hardware
Complete List is available on <project folder>/board_files/*_board_files.csv
Design supports following modules:
| Module Model | Board Part Short Name | Yocto Machine Name | PCB Revision Support | DDR | QSPI Flash | EMMC | Others | Notes |
|---|---|---|---|---|---|---|---|---|
| TEM0007-01-S002 | 25_1E0_ES_1GB | tem0007 | REV01 | 1GB | 64MB | ---- | ---- | ---- |
| TEM0007-01-CHE11-A* | 250_1E_1GB | tem0007 | REV01 | 1GB | 64MB | ---- | ---- | ---- |
TEM0007-01-CAA11-A | 025_1E_1GB | tem0007 | REV01 | 1GB | 64MB | ---- | ---- | ---- |
TEM0007-01-CAD11-A | 025_1I_1GB | tem0007 | REV01 | 1GB | 64MB | ---- | ---- | ---- |
| TEM0007-01-CBD11-A | 095_1I_1GB | tem0007 | REV01 | 1GB | 64MB | ---- | ---- | ---- |
*used as reference
Hardware Modules
The Design requires one of the following carriers:
| Carrier Model | PCB Revision Support | Notes |
|---|---|---|
| ---- | ||
| TEB2000* | REV01 | The carrier board for TEM0007. For more information refer to TEB2000 Getting Started |
*used as reference
Hardware Carrier
Additional hardware requirements:
| Additional Hardware | Quantity | Notes |
|---|---|---|
| Mini USB cable for JTAG/UART | 2 | Check Carrier Board and Programmer for correct type |
| RJ45 Ethernet cable | 1 | |
| SD card | 1 | At least 8GB |
| USB Stick | 1 | Optional |
Additional Hardware
Content
For further insight into the structure of a Trenz Reference Design Download and usage of its content in general , please follow the link Project Delivery - Microchip devices
Design Sources
| Type | Location | Notes |
|---|---|---|
| Folder name | Path inside the Trenz Reference Download Archive | --- |
| Libero | <project folder>/libero_source | Hardware Design Project , will be generated by TE Scripts |
<project folder>/libero_<Board Part Short Name> | Source files for specific assembly variants | |
| SoftConsole | <project folder>/softconsole_source | Software Design / Boot Code / Bootloader / Application Software |
| Yocto | <project folder>/os/yocto | Linux distribution. Trenz electronic yocto BSP files for TEM0007 |
| <project folder>/prebuilt | Compiled binaries to program Hard and Soft -ware Designs | |
| <project folder>scripts | TE Scripts folder | |
| *.cmd | <project folder> | Starting scripts for the most imported TE Scripts |
Design sources
Prebuilt
File | File-Extension | Description |
|---|---|---|
| Libero Project File | *.prjx | Project file |
| FlashPro Express Job | *.job | The exported job file contains the data contents to be programmed into PolarFire FPGA and external SPI Flash. This job file is used in the FlashPro Express software to program both device and external SPI Flash. |
| Constraint File | *.pdc | IO constraint file |
| Timing Constraint File | *.sdc | Timing constraint file |
| Configuration File | *.cfg | Polarfire MSS configuration file is prepared in Polarfire MSS Configurator software. The Polarfire MSS Configuration software will export the *.xml , *.cxf files after that. |
| Components in Block Design | *.cxf | Exported file of Polarfire MSS Configuration software for importing in Libero software |
| xml file | *.xml | Exported file of Polarfire MSS Configuration software for importing in SoftConsole software |
| Software Application File | *.hex | Generated hex file by SoftConsole software to program on eNVM memory of Polarfire SoC |
| Software-Application-File | *.elf | Software application generated by SoftConsole software |
| Libero Application File | *.ppd / *dat | Bitstream files |
Device Tree | *.dtb | Device tree blob |
| CONF-File | *.conf | Boot configuration file |
| Yocto linux image | *.wic | This File can be flashed via bmaptool command in host linux or other tools same as Win32DiskImager or balenaEtcher on the SD card. |
| Yocto linux image | *.img | Linux image for SD card |
Prebuilt files (only on ZIP with prebult content)
Download
Reference Design is only usable with the specified Libero version. Do never use different versions of Libero software for the same project.
Reference design is available on:
Design Flow
Trenz Electronic provides a TCL project generation based on Microchip's Design Flow where possible.
See also:
Libero SoC
Reference Design is available with and without prebuilt files. It's recommended to use TE prebuilt files for first launch.
The Libero SoC Hardware Design Project for this board is delivered as a TCL script which utilizes the Libero SoC Command API .
The script Libero SoC Project will be generated into the folder "<project folder> / libero_<Variant short name>".
- Run the script "Generate_TEM0007_Hardware-Design_in_Libero_SoC_v2023.1.cmd" and follow instructions on the console :
- The script searches for a suitable Libero SoC installation at the beginning and lists them plus some other option to manually guide the script to the Libero SoC installation of your liking .
- Further will the script offer options to chose from :
- Upgrade all Libero SoC General Soft Cores
- Select your Trenz Board Subversion / Assembly Variant from a list
- Select the set of Soft Cores to be used during project generation. The set of soft cores versions used during development or the newest available versions and if possible this selection is possible , download them or use a copy from the Trenz Download
- When necessary , to resolve a Folder Overwrite Conflict
- Chose your prefered Hardware Description Language (VHDL / Verilog)
- After the project generation , the script continues with the following options :
- Compile the bitstream of the project and obtain the Programming Files
- Open the project for use
- Now the generated and exported files existing in prebuilt folder are without HSS generated hex/elf file. If the hex file is attached to job file it will not be necessary to program HSS generated hex file on eNVM memory. To attach the hex file to job file execute the following instructions (optional).
In test board reference zip file the job files in prebuilt folder consist of HSS generated hex file. The following instruction are only to know , how the final job file is prepared and regenerated.
- After generating bitstream file double click on "Configure Design Initialization Data and Memories" in Design Flow now.
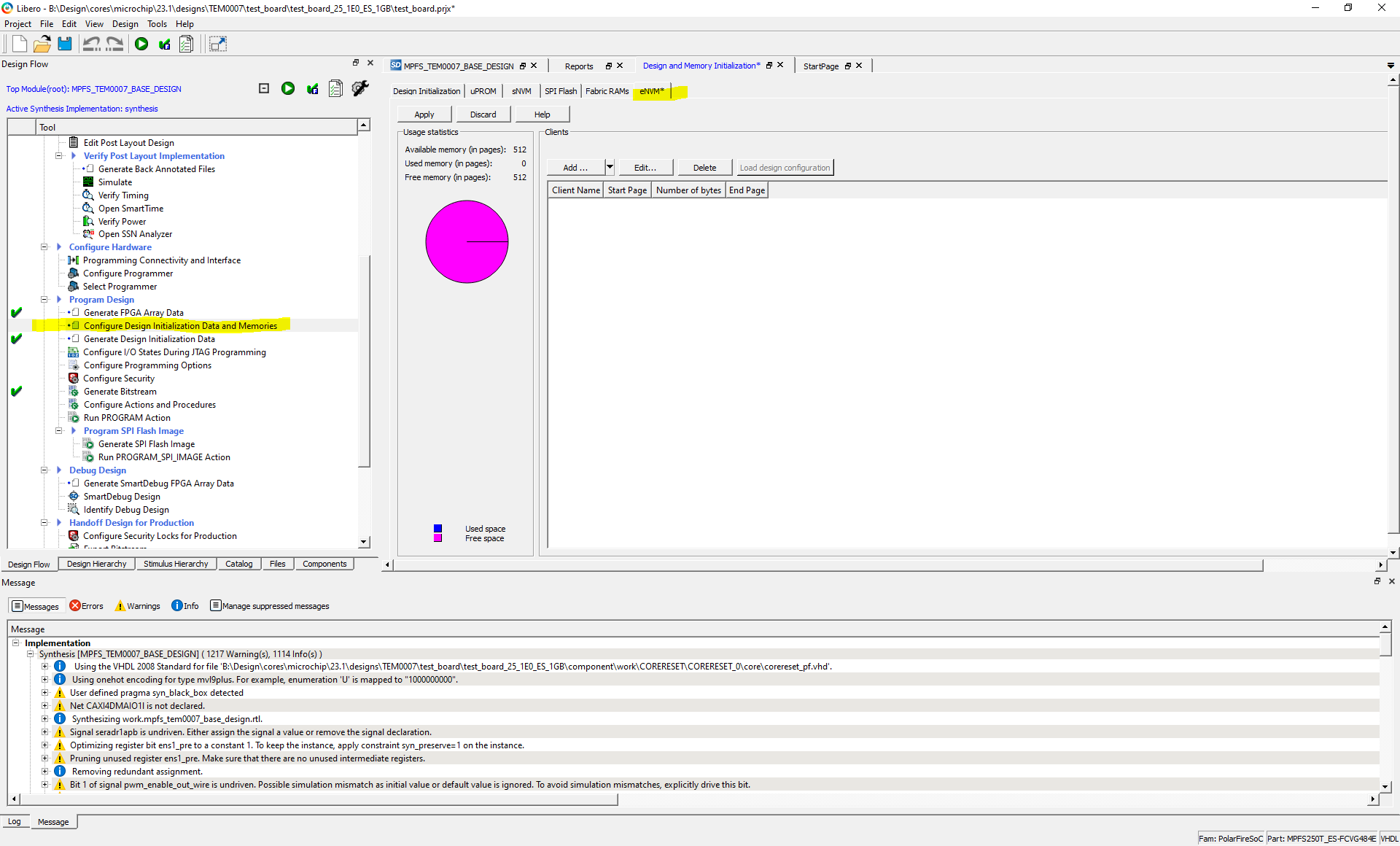
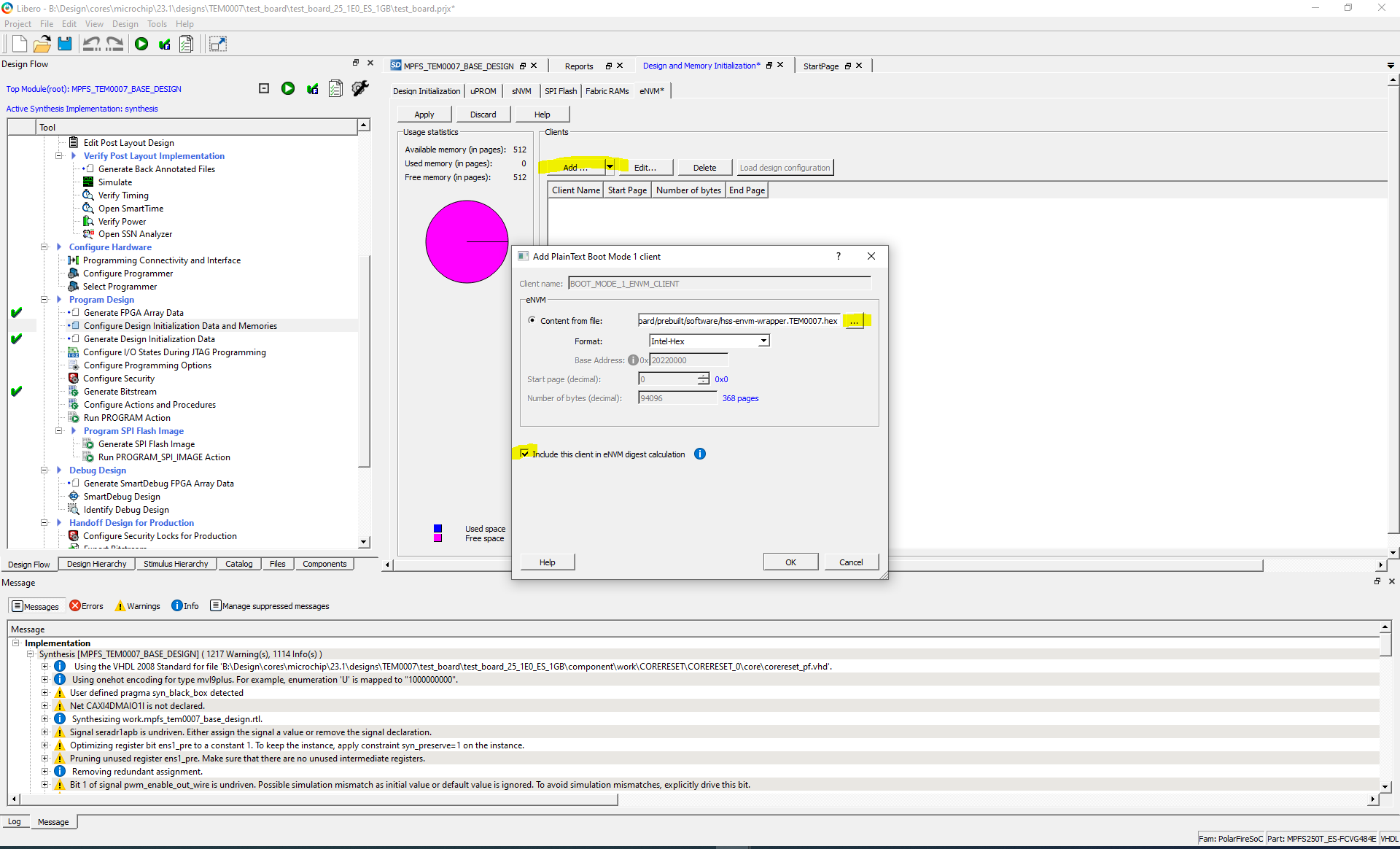
- Click on eNVM and after that on Add and click on Add Boot Mode 1 Client.
- Enter the path of generated *.hex File by SoftConsole software (HSS) or the path of saved *.hex file in prebuilt folder ( for example "...\test_board\prebuilt\hardware\250_1E_1GB"and click on OK.
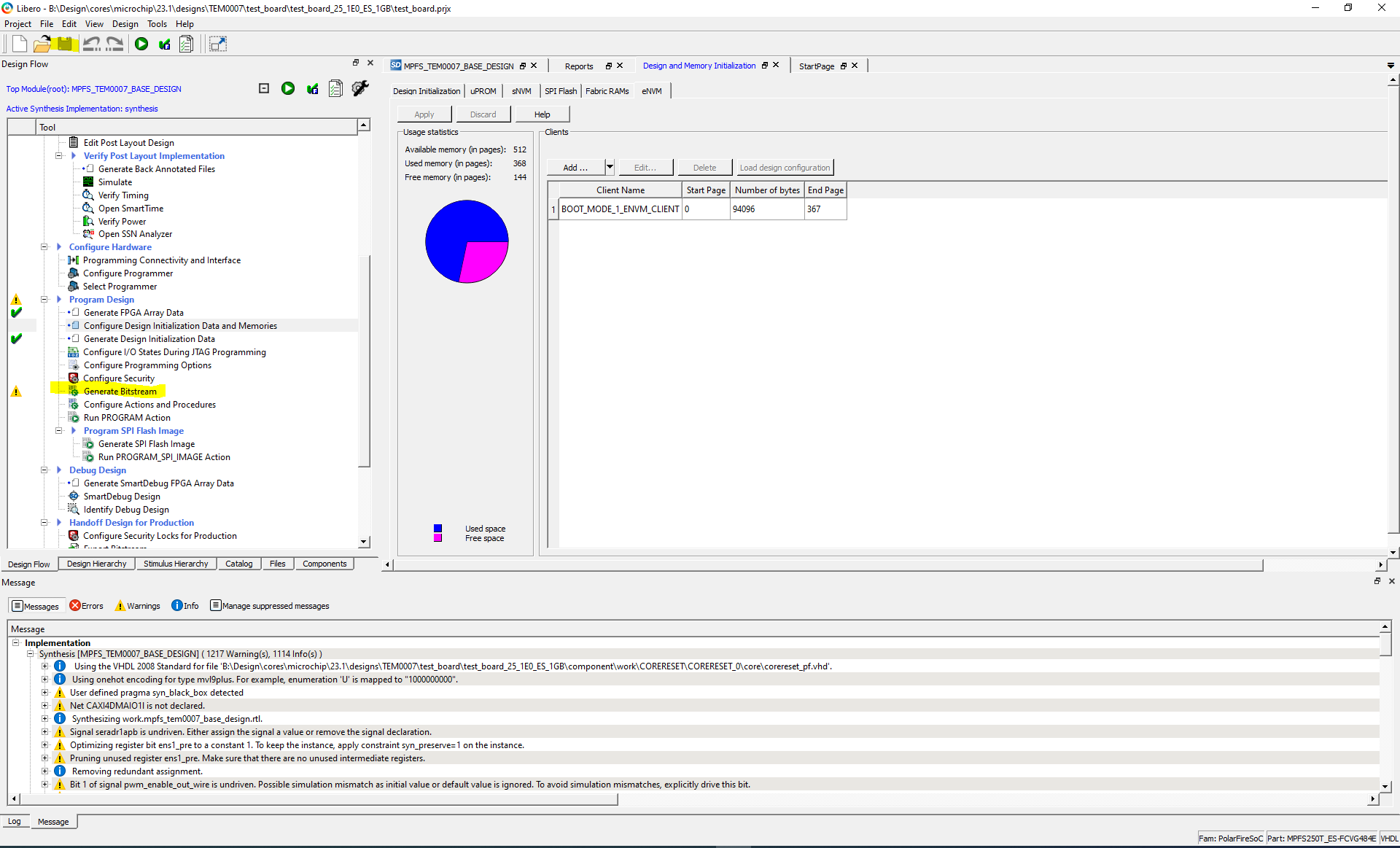
- Save the project and double click on Generate Bitstream.
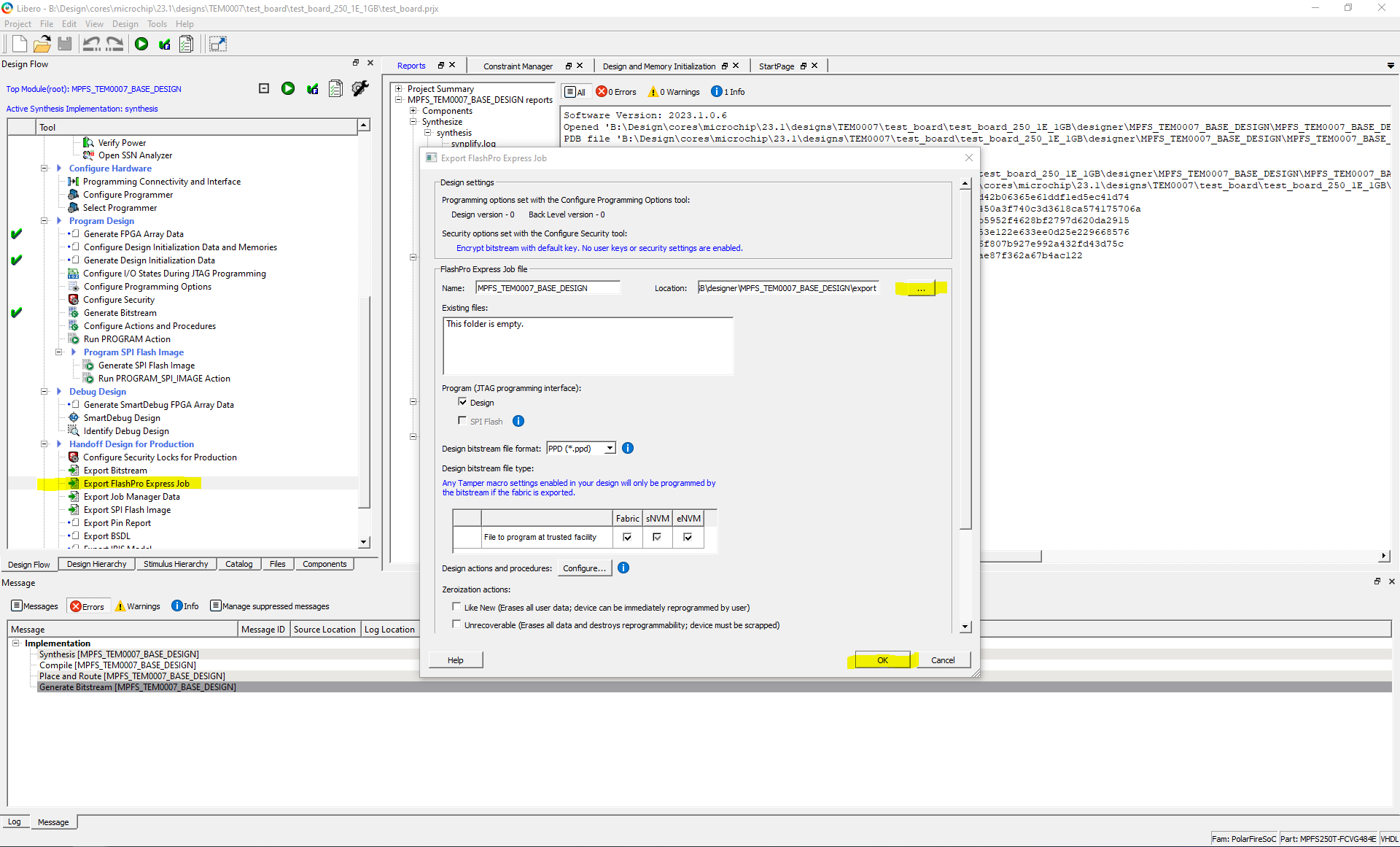
- Double click on "Export Flashpro ExpressJob" and enter the desired path for *.job file to generate .job File. The *.job will be used to program the polarfire soc in FPExpress software.
Launch
Hardware Setup
- Connect the TEB2000 carrier board via its J4 mini USB connector to the PC. (For Linux console)
- Connect the TEB2000 carrier board via its J21 mini USB connector to the PC. (For HSS console)
- Connect the 5V power supply to 5V input voltage connector J13.
- Connect the RJ45 network cable to the ethernet interface J14.
- Connect the USB stick to the USB stick socket J12.
- For more information see TEB2000 Getting Started
Programming Bitstream
Check module and carrier TRMs for proper HW configuration before you try any design.
There is two ways to program bitstream file on FPGA. The Bitstream can be programmed into the FPGA / SOC by Libero SoC or Flash Pro Express :
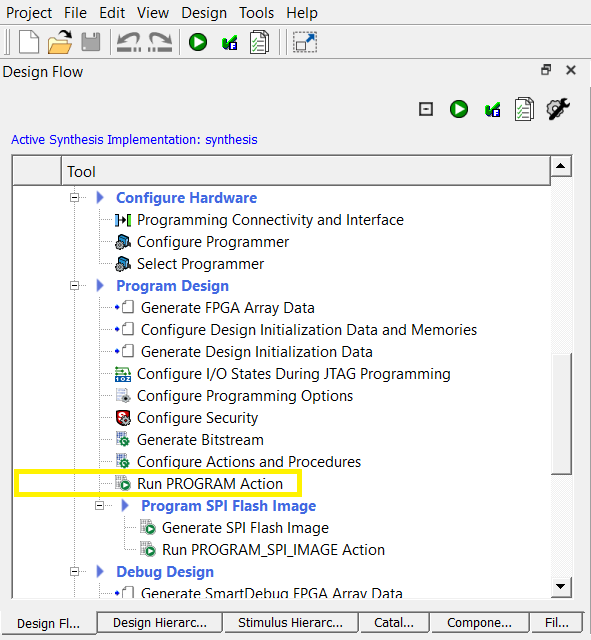
Using Libero SoC
- Prepare the hardware see Hardware Setup
- Double click onto "Run PROGRAM Action" to program the Polarfire SoC.
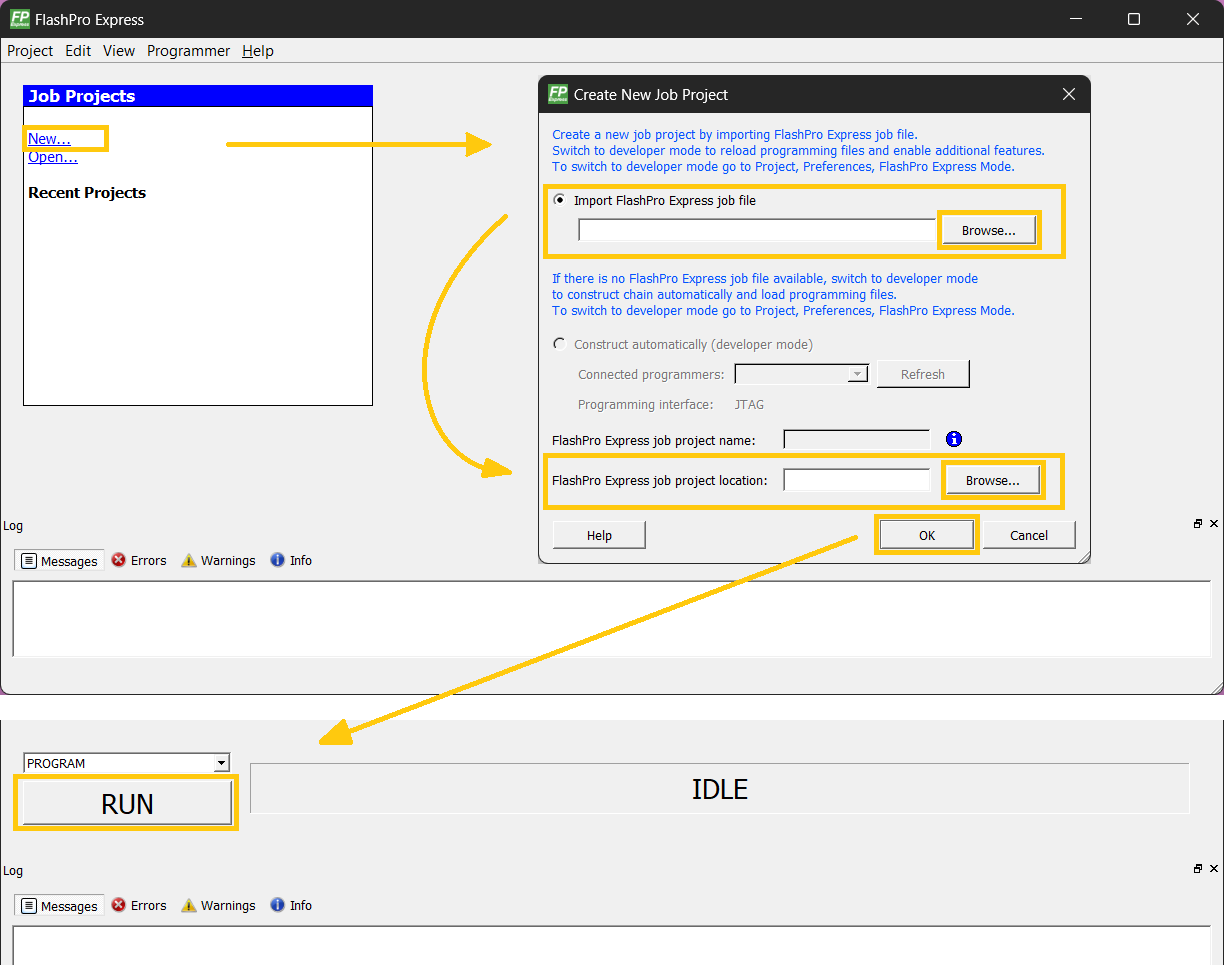
Using FPExpress software
- Prepare the hardware see Hardware Setup
- Click on NEW... to open the "Creat New Job Project" dialog
- Clicking onto the upper Browse... button to specify the Programming Job File location
- Clicking onto the lower Browse... button to specify the location of where to store the FlashPro Express Job Project which will be created .The Job Project name automatically uses the programming job name and cannot be changed .
- Click OK and a new Job Project will be created and opened for production programming
- Click on RUN to start the programming of a board
Programming eNVM
The eNVM is a user non-volatile flash memory that can be programmed independently. There is two methods to program eNVM:
Programming eNVM in SoftConsole
To program HSS *.hex file on FPGA:
- Prepare the hardware see Hardware Setup
- Open SoftConsole software as administrator, if it is not done yet.
- Select correct directory as workspace directory and import hart-software-services source code.
- Right click on the hart-software-services and click on Build Project, if it is not done yet. For more information see Hart Software Services (HSS)
- Click on Run > External Tools > Polarfire SoC program non-secure boot-mode 1
Programming eNVM in Flashpro Express
The HSS generated hex file can be attached to bitstream file. For more information see Design Flow
To program the eNVM in Flashpro Express see Using FlashPro Express
SD-Boot mode
This module supports SD card boot and JTAG boot mode. The selection between them will be done in HSS, so there is no need to select the boot mode via Dip Switches .
Prepare SD card as follows for SD card boot mode:
- Extract SD_Card.zip file
- Now there is a image file (SD_Card.img)
- Alternative SD card can be written via win32diskimager or balenaEtcher softwares in Windows OS.
- In the case of writing image file in linux there are two commands to write image file on the SD card after mounting SD card in the host linux same as WSL:
- After mounting the SD card in linux the name of SD card recognized via "lsblk" command. For example SD card name can be sda or sdb.
- After mounting the SD card in linux the name of SD card recognized via lsblk command. For example SD card name can be sda or sdb.
JTAG
Not used on this example.
Usage
- Prepare HW like described on section Hardware Setup
- Power on PCB
UART
- Open two serial console for HSS and Linux console (e.g. PuTTY)
Select COM Port of linux console (UART1)
Win OS: see device manager
Linux OS: see dmesg | grep tty (UART is *USB1)
- Select COM port of HSS console (UART0)
- Speed for both consoles : 115200
- Press reset button
- Console output depends on used software project, see Application
- HSS console (UART0):
- This console can be monitored by user , to know some additional information same as SD card status ( If SD card by booting is detected or not) , U54 cores status or memory size , ....
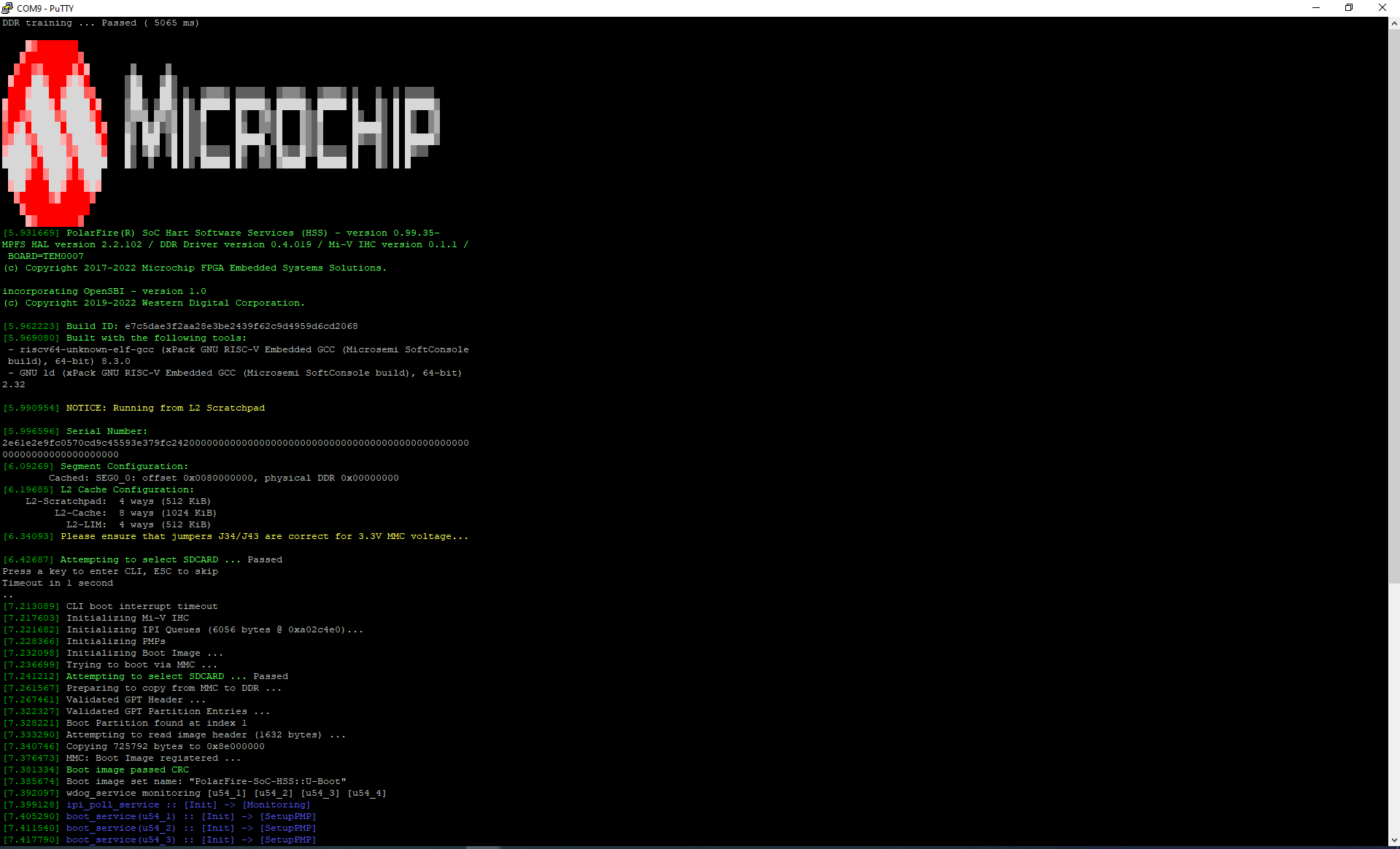
- This console can be monitored by user , to know some additional information same as SD card status ( If SD card by booting is detected or not) , U54 cores status or memory size , ....
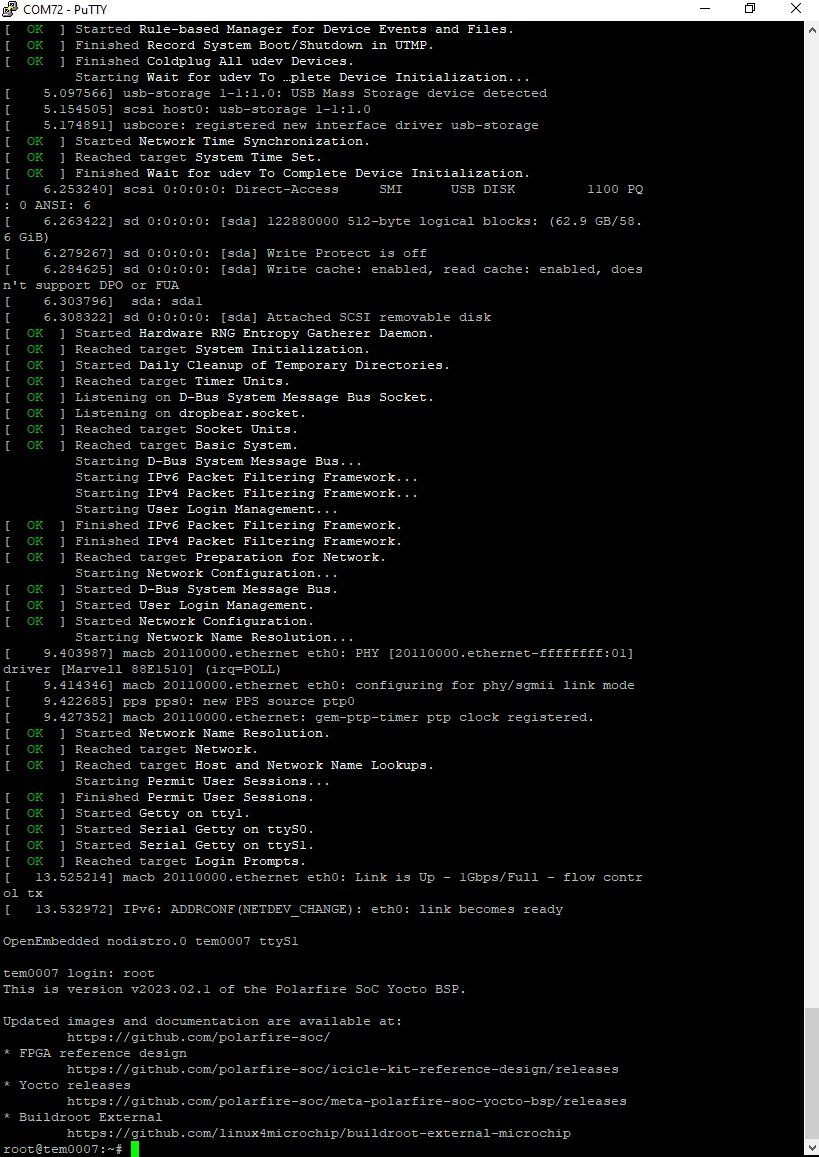
- Linux Console (UART1):
Login data:
Note: Wait until Linux boot finished
tem0007 login: root
You can use Linux shell now.
i2cdetect -l (check I2C Bus) ifconfig -a (ETH0 check) lsusb (USB check)
System Design - Libero
Block Design
The Block Design of a board variant or revision may differ slightly depending on the assembly variant.
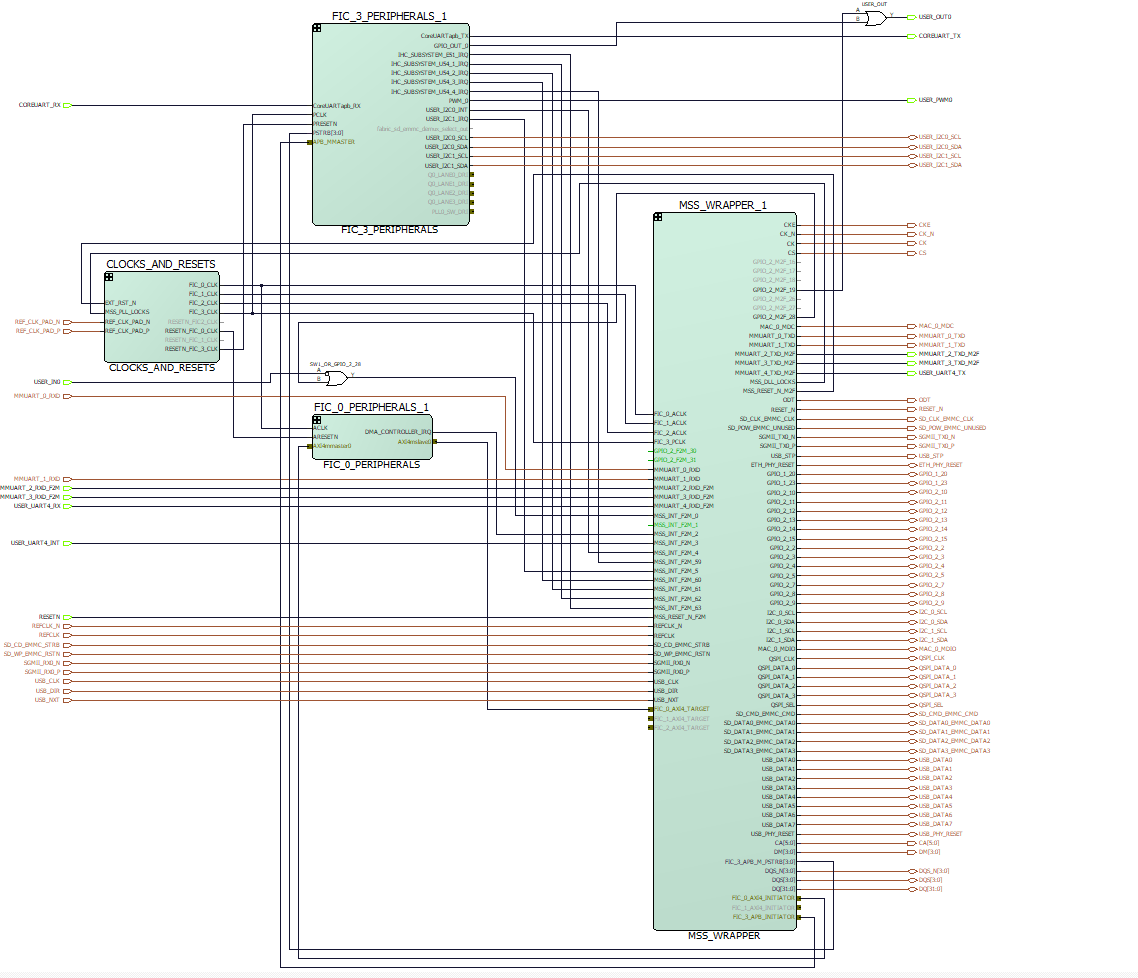
Block Design
HPS Interfaces
Activated interfaces:
| Type | Note |
| DDR | -- |
| EMAC0 | -- |
| GPIO1 | -- |
| GPIO2 | -- |
| I2C0 | -- |
| I2C1 | -- |
| SPI0 | -- |
| QSPI | -- |
| SDMMC | -- |
| UART0 | -- |
| UART1 | -- |
| USB | -- |
Constraints
TEM0007_Bank_Voltage.pdc
set_iobank -bank_name Bank0 \
-vcci 1.80 \
-fixed true \
-update_iostd true
set_iobank -bank_name Bank1 \
-vcci 3.30 \
-fixed true \
-update_iostd true
set_iobank -bank_name Bank4 \
-vcci 3.30 \
-fixed true \
-update_iostd true
TEM0007_Clock.pdc
set_io -port_name REF_CLK_PAD_P \
-pin_name J19 \
-DIRECTION INPUT
set_io -port_name REF_CLK_PAD_N \
-pin_name J20 \
-DIRECTION INPUT
TEM0007_GPIOs.pdc
set_io -port_name GPIO_2_2 \
-pin_name D9 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_3 \
-pin_name D6 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_4 \
-pin_name C6 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_7 \
-pin_name B5 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_8 \
-pin_name C5 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_9 \
-pin_name C4 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_11 \
-pin_name F16 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_12 \
-pin_name D14 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_13 \
-pin_name E14 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name GPIO_2_14 \
-pin_name B4 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
TEM0007_MAC.pdc
set_io -port_name MAC_0_MDC \
-pin_name H6 \
-fixed true \
-DIRECTION OUTPUT \
-io_std LVCMOS33
set_io -port_name MAC_0_MDIO \
-pin_name J3 \
-fixed true \
-DIRECTION INOUT \
-io_std LVCMOS33
TEM0007_MMUART0.pdc
set_io -port_name MMUART_0_TXD \
-pin_name C2 \
-fixed true \
-DIRECTION OUTPUT \
-io_std LVCMOS33
set_io -port_name MMUART_0_RXD \
-pin_name D3 \
-fixed true \
-DIRECTION INPUT \
-io_std LVCMOS33
TEM0007_MMUART1.pdc
set_io -port_name MMUART_1_TXD \
-pin_name H5 \
-fixed true \
-DIRECTION OUTPUT \
-io_std LVCMOS33
set_io -port_name MMUART_1_RXD \
-pin_name H2 \
-fixed true \
-DIRECTION INPUT \
-io_std LVCMOS33
TEM0007_Peripheral.pdc
set_io -port_name USER_PWM0 \
-pin_name D7 \
-fixed true \
-io_std LVCMOS33 \
-RES_PULL Down \
-DIRECTION OUTPUT
set_io -port_name USER_IN0 \
-pin_name V19 \
-fixed true \
-DIRECTION INPUT
set_io -port_name USER_OUT0 \
-pin_name AB19 \
-fixed true \
-DIRECTION OUTPUT
# JM2-Pin73/ JB2-Pin74 / B13_L16_N (Suitable for modified TE0703)
#set_io -port_name RESETN \
-pin_name H13 \
-fixed true \
-io_std LVTTL \
-CLAMP_DIODE OFF \
-RES_PULL Up \
-DIRECTION INPUT
# JM2-Pin55 TEM0007 / JB2-Pin56 (SRST) TEB2000 / B13_L9_P
set_io -port_name RESETN \
-pin_name E15 \
-fixed true \
-io_std LVTTL \
-CLAMP_DIODE OFF \
-RES_PULL Up \
-DIRECTION INPUT
TEM0007_QSPI.pdc
set_io -port_name QSPI_CLK \
-pin_name C10 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name QSPI_DATA_0 \
-pin_name D13 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name QSPI_DATA_1 \
-pin_name B12 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name QSPI_DATA_2 \
-pin_name C9 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name QSPI_DATA_3 \
-pin_name C12 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
set_io -port_name QSPI_SEL \
-pin_name A13 \
-fixed true \
-io_std LVCMOS33 \
-DIRECTION INOUT
MPFS_TEM0007_BASE_DESIGN_derived_constraints.sdc
create_generated_clock -name {CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT0} -multiply_by 5 -source [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT0 } ]
create_generated_clock -name {CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT1} -multiply_by 5 -source [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT1 } ]
create_generated_clock -name {CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT2} -multiply_by 5 -source [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT2 } ]
create_generated_clock -name {CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT3} -multiply_by 2 -source [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { CLOCKS_AND_RESETS_inst_0/CCC_FIC_x_CLK/PF_CCC_C0_0/pll_inst_0/OUT3 } ]
create_generated_clock -name {CLOCKS_AND_RESETS_inst_0/PF_CLK_DIV_C1_0/PF_CLK_DIV_C1_0/I_CD/Y_DIV} -edges {1 7 11} -source [ get_pins { CLOCKS_AND_RESETS_inst_0/PF_CLK_DIV_C1_0/PF_CLK_DIV_C1_0/I_CD/A } ] [ get_pins { CLOCKS_AND_RESETS_inst_0/PF_CLK_DIV_C1_0/PF_CLK_DIV_C1_0/I_CD/Y_DIV } ]
set_false_path -through [ get_nets { FIC_0_PERIPHERALS_1/DMA_INITIATOR_inst_0/ARESETN* } ]
set_false_path -through [ get_nets { FIC_0_PERIPHERALS_1/FIC0_INITIATOR_inst_0/ARESETN* } ]
Software Design - SoftConsole
Application
Template location: <project folder>/softconsole_source/
Hart Software Services (HSS)
Hart Software Services (HSS) code on PolarFire SoC, is comprised of two portions:
A superloop monitor running on the E51 minion processor, which receives requests from the individual U54 application processors to perform certain services on their behalf.
A Machine-Mode software interrupt trap handler, which allows the E51 to send messages to the U54s, and request them to perform certain functions for it related to rebooting a U54.
The HSS performs boot and system monitoring functions for PolarFire SoC. The HSS is compressed (DEFLATE) and stored in eNVM. On power-up, a small decompressor wrapper inflates the HSS from eNVM flash to L2-Scratchpad memory and starts the HSS.
Creating HSS workspace in SoftConsole
- Download the test board design zip file in the following path : TEM0007 "Test Board" Reference Design
- Unzip the test board zip file
- Copy the HSS folder (hart-software-services-<HSS version>) from softconsole_source folder in the SoftConsole workspace folder
- Open SoftConsole software as administrator
- Select correct directory as workspace directory. The workspace folder must consist of hart-software-services-<HSS version> folder. The hart-software-services-<HSS version> project can be imported in the workspace as an Existing project.
- Left click on board folder
- There is created already a subfolder for TEM0007 module and HSS is ready to be compiled as shown:
- Right click on hart-software-services-<HSS version> and click on Build project to compile it.
- It is ready to program created hex file on the Polarfire SoC. See Programming eNVM
Note that HSS can be changed for every TEM0007 variant. Therefore the hex file for every variant is created and saved in the following path of test design folder separately: (<project folder>/prebuilt/soctware/<short name of the module variant>)
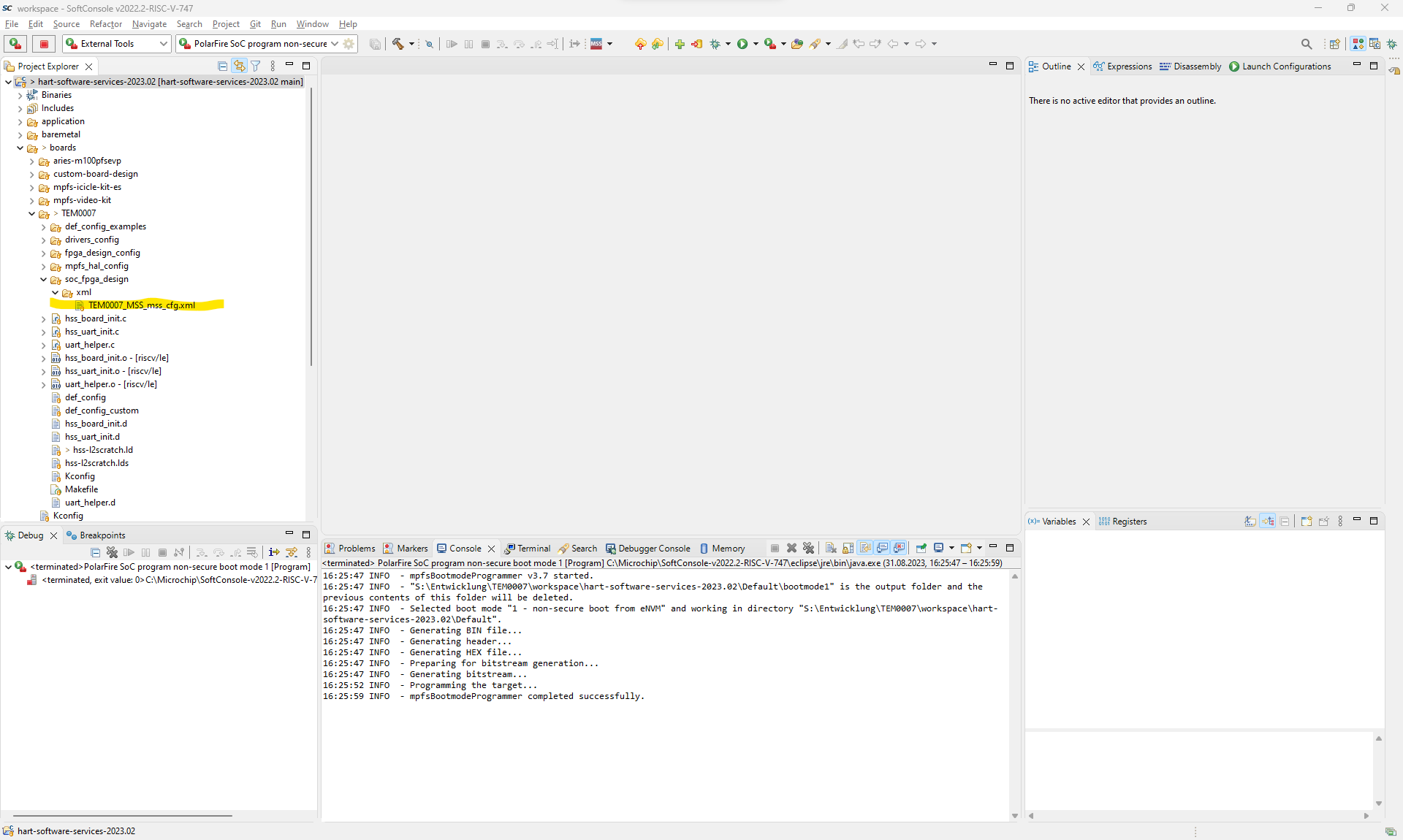
Creating XML file in PolarfireSoC MSS Configurator Software
To create HSS file for a desired module variant the saved MSS configuration xml file in "<softconsole workspace folder>/ hart-software-services-<HSS version>/board/TEM0007/soc_fpgs_design/xml/" must be matched for its related xml file. To do it:
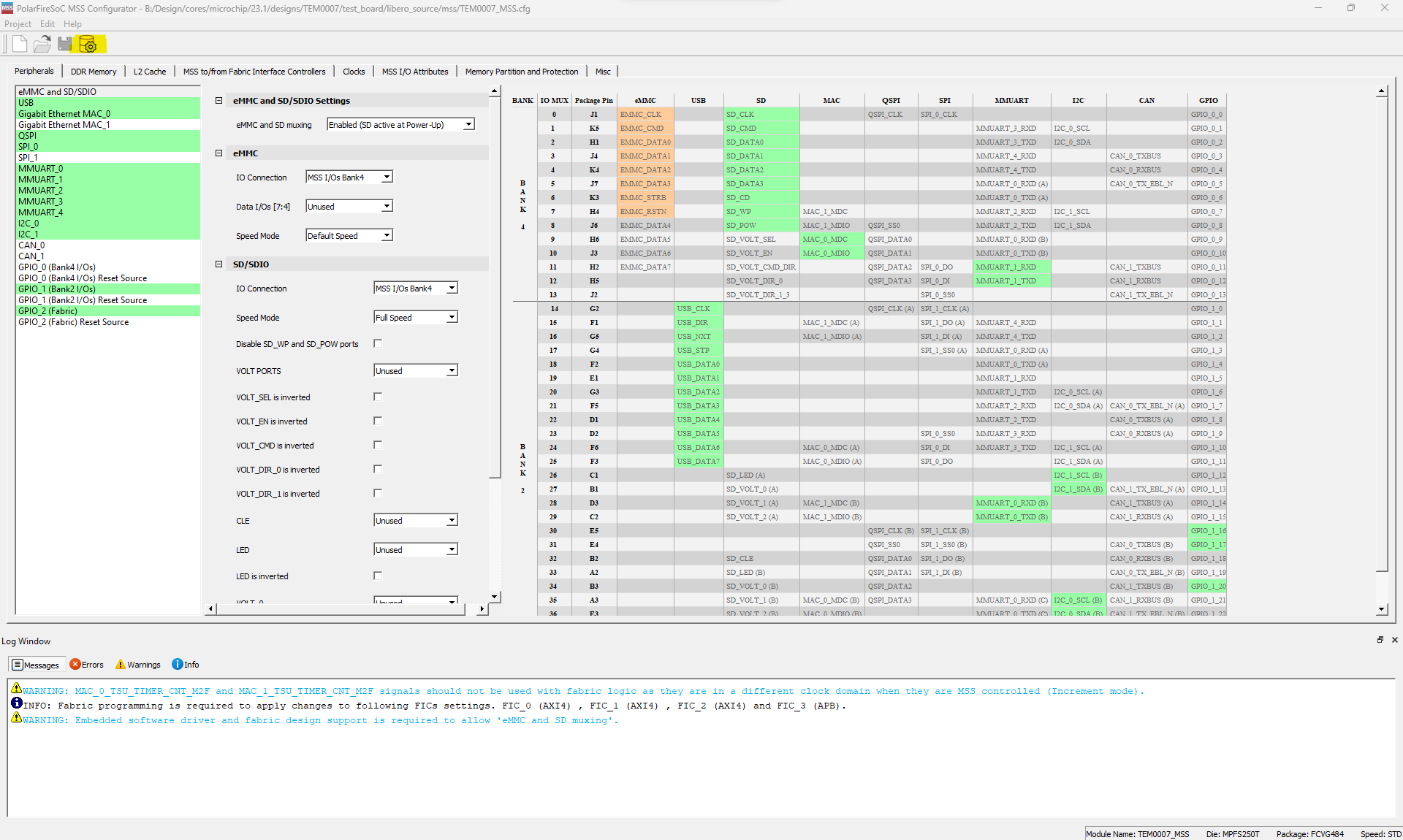
- Open the PolarfireSoC MSS Configurator software.
- Click on Project→Open
- Select the generated TEM0007_MSS.cfg file that is saved in the "<project folder>/prebuilt/mss/<short name of the module variant>" folder.
- Click on Generate icon. It will be opened a window to enter the desired path for generated xml file.
- MSS configuration xml file is generated. This file must be imported in SoftConsole software. To import this file copy the generated MSS configuration xml file and replace it with previous xml file in the following path : "<softconsole workspace folder>/ hart-software-services-<HSS version>/boards/TEM0007/soc_fpga_design/xml"
- Right click on the project in SoftConsole software and click on Clean Project.
- In SoftConsole software delete all configuration header files in "<softconsole workspace folder>/ hart-software-services-<HSS version>/boards/TEM0007/fpga_design-config" folder.
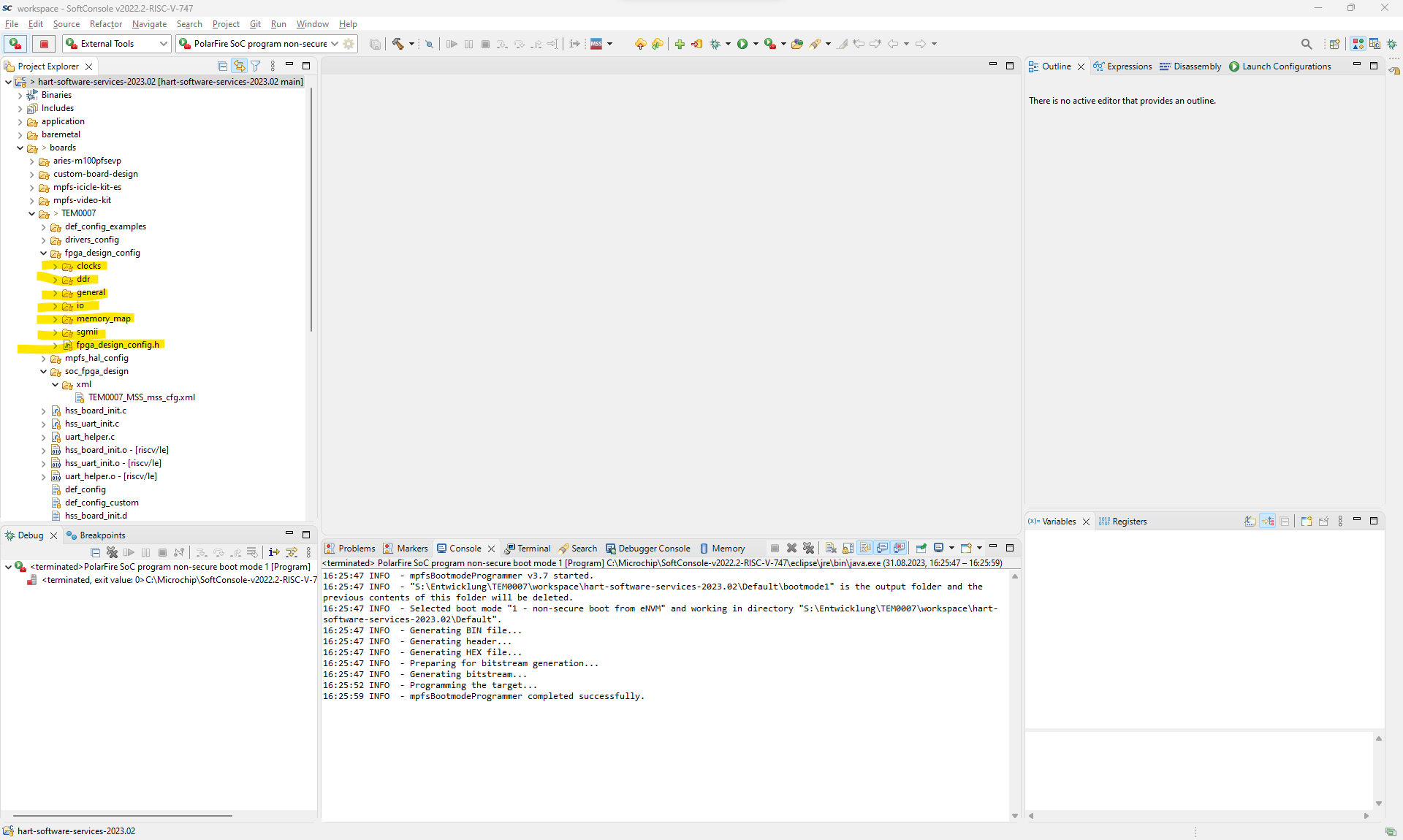
- Right click on the project in SoftConsole software again and click on Build Project to compile the project.
- The new configuration header files will be generated again by the python script in "<softconsole workspace folder>/ hart-software-services-<HSS version>/tools/polarfire-soc-configuration-generator/mpfs_configuration_generator.py " folder. The generated hex file can be found in the "<softconsole workspace folder>/ hart-software-services-<HSS version>/Default " folder.
- This new hex file must be replaced in Libero to generate new Bitstream file, if this hex file should be attached in Bitstream file. See Libero SoC
Note that this hex file can be programmed in eNVM in SoftConsole directly. See Programming eNVM in SoftConsole
Software Design - Yocto
The host pc must be prepared for using the yocto. For more information about host pc setup for yocto and the required packets please refer to System Requirements
Trenz electronic has developed his own BSP for Microchip devices same as polarfire soc in Yocto. In the following will be explained the folders in detail.
| meta-trenz-polarfire-bsp Folder | Description |
|---|---|
| recipes-apps* | Consists of start up application for executing of init.sh by booting. More application can be saved in this folder. |
| recipes-bsp | Consists of uboot required files same as *.bbappend files, device tree and etc. |
| recipes-core | Consists of *.bb file for Trenz defined image version. This file consists of required packets or files that must be installed. |
| recipes-kernel | Consists of kernel required files same as *.bbappend files, device tree, config files and etc. |
| recipes-tools | Consists of a *.bbappend file. |
| tools | Consists of manifest xml file to define meta data that are required. |
| wic | Consists of *.wks file that describes disk image properties. |
*Note: In this version is not used.
In the following table exists more information about required packets and supported version.
| Meta data | Supported Version | Description |
|---|---|---|
| meta-riscv | Kirkstone | |
| openembedded-core | Kirkstone | |
| meta-openembedded | Kirkstone | |
| meta-polarfire-soc-yocto-bsp | 2022.11 |
Trenz BSP contains of a shell script. If this shell script is executed , all required processes for making a linux image file will be executed automatically. The user needs only to write the generated image file on the SD card. To prepare the image file :
- Create a new folder (for example TEM0007) in host linux ( here Ubuntu18.04 and Ubuntu 20.04 have been tested )
- Download the test board design as zip file (See Download) and save meta-trenz-polarefile-bsp BSP folder from "<project folder>/os/yocto/ " folder in the created folder. (for example TEM0007)
- Go to the created folder (for example TEM0007) that meta-trenz-polarfire-bsp is saved and execute its shell script as shown:
*Note: The shell script must be executed in created new folder (for example TEM0007) that has bsp folder saved in it. - After compiling image file *.img and its converted zip file *.zip will be saved in trenz bsp folder:
- " <trenz BSP folder>/prebuilt/boot/yocto/SD_Card.img "
" <trenz BSP folder>/prebuilt/boot/yocto/SD_Card.zip "
- " <trenz BSP folder>/prebuilt/boot/yocto/SD_Card.img "
U-Boot
File location: <trenz BSP folder>/recipes-bsp/u-boot/
Changes:
CONFIG_PHY_MARVELL=y
CONFIG_DEFAULT_DEVICE_TREE="tem0007"
CONFIG_DEFAULT_FDT_FILE="tem0007.dtb"
CONFIG_OF_LIST="tem0007"
CONFIG_DM_GPIO=y
CONFIG_CMD_GPIO=y
CONFIG_LOG=y
CONFIG_LOG_MAX_LEVEL=y
CONFIG_LOG_CONSOLE=y
CONFIG_NVMEM=y → to be able to read MAC vom EEPROM
CONFIG_DM_RTC=y
Device Tree
U-boot Device Tree
tem0007.dtsi
// SPDX-License-Identifier: (GPL-2.0 OR MIT)
/*
* Copyright (C) 2020 Microchip Technology Inc.
* Padmarao Begari <padmarao.begari@microchip.com>
*/
/ {
aliases {
cpu1 = &cpu1;
cpu2 = &cpu2;
cpu3 = &cpu3;
cpu4 = &cpu4;
};
};
tem0007.dts
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (C) 2021 Microchip Technology Inc.
* Padmarao Begari <padmarao.begari@microchip.com>
*/
/dts-v1/;
#include "microchip-mpfs.dtsi"
#include "dt-bindings/gpio/gpio.h"
/* Clock frequency (in Hz) of the rtcclk */
#define RTCCLK_FREQ 1000000
/ {
model = "Microchip PolarFire-SoC Icicle Kit";
compatible = "microchip,mpfs-icicle-kit", "microchip,mpfs";
aliases {
serial1 = &uart1;
ethernet0 = &mac0;
spi0 = &qspi;
};
chosen {
stdout-path = "serial1";
};
cpus {
timebase-frequency = <RTCCLK_FREQ>;
};
ddrc_cache: memory@80000000 {
device_type = "memory";
reg = <0x0 0x80000000 0x0 0x40000000>;
clocks = <&clkcfg CLK_DDRC>;
status = "okay";
};
usb_phy: usb_phy {
#phy-cells = <0>;
compatible = "usb-nop-xceiv";
reset-gpios = <&gpio1 17 GPIO_ACTIVE_LOW>;
reset-names = "OTG_RST";
};
};
&uart1 {
status = "okay";
};
&mmc {
status = "okay";
bus-width = <4>;
disable-wp;
cap-mmc-highspeed;
cap-sd-highspeed;
cd-debounce-delay-ms;
card-detect-delay = <200>;
// mmc-ddr-1_8v;
// mmc-hs200-1_8v;
sd-uhs-sdr12;
sd-uhs-sdr25;
sd-uhs-sdr50;
sd-uhs-sdr104;
};
&i2c1 {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
eeprom: eeprom@50 {
compatible = "microchip,24aa025", "atmel,24c02";
//compatible = "atmel,24c02";
reg = <0x50>;
#address-cells = <1>;
#size-cells = <1>;
eth0_addr: eth-mac-addr@FA {
reg = <0xFA 0x06>;
};
};
};
&refclk {
clock-frequency = <125000000>;
};
&mac1 {
status = "disabled";
};
&mac0 {
status = "okay";
phy-mode = "sgmii";
nvmem-cells = <ð0_addr>;
nvmem-cell-names = "mac-address";
phy-handle = <&phy0>;
phy0: ethernet-phy@1 {
device-type = "ethernet-phy";
reg = <1>;
reset-names = "ETH_RST";
reset-gpios = <&gpio1 16 GPIO_ACTIVE_LOW>;
};
};
&qspi {
status = "okay";
num-cs = <1>;
flash0: spi-nor@0 {
compatible = "spi-nor";
reg = <0x0>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
spi-max-frequency = <20000000>;
spi-cpol;
spi-cpha;
};
};
&usb {
status = "okay";
dr_mode = "otg";
// dr_mode = "host";
phys = <&usb_phy>;
};
Kernel Device Tree
tem0007.dts
// SPDX-License-Identifier: (GPL-2.0 OR MIT)
/* Copyright (c) 2020-2021 Microchip Technology Inc */
/dts-v1/;
#include "mpfs.dtsi"
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/phy/phy.h>
/* Clock frequency (in Hz) of the rtcclk */
#define MTIMER_FREQ 1000000
/ {
#address-cells = <2>;
#size-cells = <2>;
model = "Trenz TEM0007";
compatible = "trenz,tem0007","microchip,mpfs";
aliases {
ethernet0 = &mac0;
serial0 = &mmuart0;
serial1 = &mmuart1;
serial2 = &mmuart2;
serial3 = &mmuart3;
serial4 = &mmuart4;
};
chosen {
stdout-path = "serial1:115200n8";
};
cpus {
timebase-frequency = <MTIMER_FREQ>;
};
//******************************************************//
ddrc_cache: memory@80000000 {
device_type = "memory";
reg = <0x0 0x80000000 0x0 0x40000000>;
status = "okay";
};
reserved-memory {
#address-cells = <2>;
#size-cells = <2>;
ranges;
fabricbuf0ddrc: buffer@A0000000 {
compatible = "shared-dma-pool";
reg = <0x0 0xA0000000 0x0 0x2000000>;
no-map;
};
};
udmabuf0 {
compatible = "ikwzm,u-dma-buf";
device-name = "udmabuf-ddr-c0";
minor-number = <0>;
size = <0x0 0x2000000>;
memory-region = <&fabricbuf0ddrc>;
sync-mode = <3>;
};
//******************************************************//
usb_phy: usb_phy {
#phy-cells = <0>;
compatible = "usb-nop-xceiv";
reset-gpios = <&gpio1 17 GPIO_ACTIVE_LOW>;
reset-names = "OTG_RST";
};
soc {
dma-ranges = <0 0 0 0 0x40 0>;
};
};
&gpio1 {
status = "okay";
};
&gpio2 {
interrupts = <53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>,
<53>, <53>, <53>, <53>;
status = "okay";
};
&i2c0 {
status = "okay";
};
&i2c1 {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
eeprom: eeprom@50 {
compatible = "microchip,24aa025", "atmel,24c02";
//compatible = "atmel,24c02";
reg = <0x50>;
#address-cells = <1>;
#size-cells = <1>;
eth0_addr: eth-mac-addr@FA {
reg = <0xFA 0x06>;
};
};
};
&mac0 {
status = "okay";
phy-mode = "sgmii";
nvmem-cells = <ð0_addr>;
nvmem-cell-names = "mac-address";
phy-handle = <&phy0>;
phy0: ethernet-phy@1 {
device-type = "ethernet-phy";
reg = <1>;
reset-names = "ETH_RST";
reset-gpios = <&gpio1 16 GPIO_ACTIVE_LOW>;
};
};
&mbox {
status = "okay";
};
&mmc {
status = "okay";
bus-width = <4>;
disable-wp;
cap-sd-highspeed;
cap-mmc-highspeed;
// mmc-ddr-1_8v;
// mmc-hs200-1_8v;
sd-uhs-sdr12;
sd-uhs-sdr25;
sd-uhs-sdr50;
sd-uhs-sdr104;
};
&mmuart1 {
status = "okay";
};
&mmuart2 {
status = "okay";
};
&mmuart3 {
status = "okay";
};
&mmuart4 {
status = "okay";
};
&qspi {
status = "okay";
num-cs = <1>;
};
&refclk {
clock-frequency = <125000000>;
};
&spi0 {
status = "okay";
};
&usb {
status = "okay";
dr_mode = "otg";
// dr_mode = "host";
phys = <&usb_phy>;
};
&syscontroller {
status = "okay";
};
Kernel
File location: <trenz BSP folder>/recipes-kernel/linux/
Changes:
CONFIG_CMDLINE_BOOL=y
CONFIG_CMDLINE="earlycon=sbi root=/dev/mmcblk0p3 rootwait uio_pdrv_genirq.of_id=generic-uio"
CONFIG_EEPROM_AT24=y
CONFIG_NVMEM=y
CONFIG_NVMEM_SYS=y
CONFIG_REGMAP_I2C=y
- CONFIG_MARVELL_PHY=y
CONFIG_LEDS_GPIO=y
CONFIG_LEDS_CLASS=y
CONFIG_NEW_LEDS=y
CONFIG_GPIOLIB=y
CONFIG_USB_MUSB_HOST=y
CONFIG_USB_MUSB_DUAL_ROLE=y
CONFIG_MTD_SPI_NOR_USE_4K_SECTORS=n
CONFIG_MTD_UBI=y
CONFIG_MTD_CMDLINE_PARTS=y
CONFIG_UBIFS_FS=y
CONFIG_MTD_SPI_NOR=y
CONFIG_OF_OVERLAY=y
CONFIG_OF_CONFIGFS=y
CONFIG_MFD_SENSEHAT_CORE=m
CONFIG_INPUT_JOYDEV=m
CONFIG_INPUT_JOYSTICK=y
CONFIG_JOYSTICK_SENSEHAT=m
CONFIG_AUXDISPLAY=y
CONFIG_SENSEHAT_DISPLAY=m
CONFIG_HTS221=m
CONFIG_IIO_ST_PRESS=m
CONFIG_IIO_ST_LSM6DSX=m
CONFIG_IIO_ST_MAGN_3AXIS=m
#CONFIG_MUSB_PIO_ONLY is not set
CONFIG_USB_INVENTRA_DMA=y
Images
Image recipe for minimal console image
File location: <trenz BSP folder>/recipes-core/images/
Image recipes:
- te-image-minimal.bb: create minimal linux image
Added packages/recipes:
startup
iputils-ping
expect
rsync
rng-tools
iperf3
devmem2
can-utils
usbutils
pciutils
polarfire-soc-linux-examples
dt-overlay-mchp
libgpiod
libgpiod-tools
libgpiod-dev
i2c-tools
vim vim-vimrc
net-tools
htop
iw
python3
python3-pip
python3-flask
python3-flask-dev
python3-werkzeug
libudev
glib-2.0
sqlite3
dtc
cmake
tar
wget
zip
mtd-utils
mtd-utils-ubifs
Rootfs
Used filesystem: Root file system (RootFS)
Appx. A: Change History and Legal Notices
Document Change History
To get content of older revision got to "Change History" of this page and select older document revision number.
| Date | Document Revision | Authors | Description |
|---|---|---|---|
| |||
2023-11-13 | v.57 | Mohsen Chamanbaz |
|
2023-09-08 | v.56 | Mohsen Chamanbaz |
|
2023-09-07 | v.54 | Mohsen Chamanbaz |
|
| -- | all | -- |
Document change history
Legal Notices
Data Privacy
Please also note our data protection declaration at https://www.trenz-electronic.de/en/Data-protection-Privacy
Document Warranty
The material contained in this document is provided “as is” and is subject to being changed at any time without notice. Trenz Electronic does not warrant the accuracy and completeness of the materials in this document. Further, to the maximum extent permitted by applicable law, Trenz Electronic disclaims all warranties, either express or implied, with regard to this document and any information contained herein, including but not limited to the implied warranties of merchantability, fitness for a particular purpose or non infringement of intellectual property. Trenz Electronic shall not be liable for errors or for incidental or consequential damages in connection with the furnishing, use, or performance of this document or of any information contained herein.
Limitation of Liability
In no event will Trenz Electronic, its suppliers, or other third parties mentioned in this document be liable for any damages whatsoever (including, without limitation, those resulting from lost profits, lost data or business interruption) arising out of the use, inability to use, or the results of use of this document, any documents linked to this document, or the materials or information contained at any or all such documents. If your use of the materials or information from this document results in the need for servicing, repair or correction of equipment or data, you assume all costs thereof.
Copyright Notice
No part of this manual may be reproduced in any form or by any means (including electronic storage and retrieval or translation into a foreign language) without prior agreement and written consent from Trenz Electronic.
Technology Licenses
The hardware / firmware / software described in this document are furnished under a license and may be used /modified / copied only in accordance with the terms of such license.
Environmental Protection
To confront directly with the responsibility toward the environment, the global community and eventually also oneself. Such a resolution should be integral part not only of everybody's life. Also enterprises shall be conscious of their social responsibility and contribute to the preservation of our common living space. That is why Trenz Electronic invests in the protection of our Environment.
REACH, RoHS and WEEE
REACH
Trenz Electronic is a manufacturer and a distributor of electronic products. It is therefore a so called downstream user in the sense of REACH. The products we supply to you are solely non-chemical products (goods). Moreover and under normal and reasonably foreseeable circumstances of application, the goods supplied to you shall not release any substance. For that, Trenz Electronic is obliged to neither register nor to provide safety data sheet. According to present knowledge and to best of our knowledge, no SVHC (Substances of Very High Concern) on the Candidate List are contained in our products. Furthermore, we will immediately and unsolicited inform our customers in compliance with REACH - Article 33 if any substance present in our goods (above a concentration of 0,1 % weight by weight) will be classified as SVHC by the European Chemicals Agency (ECHA).
RoHS
Trenz Electronic GmbH herewith declares that all its products are developed, manufactured and distributed RoHS compliant.
WEEE
Information for users within the European Union in accordance with Directive 2002/96/EC of the European Parliament and of the Council of 27 January 2003 on waste electrical and electronic equipment (WEEE).
Users of electrical and electronic equipment in private households are required not to dispose of waste electrical and electronic equipment as unsorted municipal waste and to collect such waste electrical and electronic equipment separately. By the 13 August 2005, Member States shall have ensured that systems are set up allowing final holders and distributors to return waste electrical and electronic equipment at least free of charge. Member States shall ensure the availability and accessibility of the necessary collection facilities. Separate collection is the precondition to ensure specific treatment and recycling of waste electrical and electronic equipment and is necessary to achieve the chosen level of protection of human health and the environment in the European Union. Consumers have to actively contribute to the success of such collection and the return of waste electrical and electronic equipment. Presence of hazardous substances in electrical and electronic equipment results in potential effects on the environment and human health. The symbol consisting of the crossed-out wheeled bin indicates separate collection for waste electrical and electronic equipment.
Trenz Electronic is registered under WEEE-Reg.-Nr. DE97922676.
Table of contents
Overview
Content Tools